|
지금까지 로봇 제어는 자율제어와 원격제어가 기계적으로 분리되어 기능이 효율적이지 못했습니다. 현재 제어의 고기능화 차원에서 분석 및 복합화 실현이 요구되고 있는데요. 오늘 인터뷰에서 만나 보실 박용래 교수(서울대학교 기계공학부)는 단일 센서만으로 인장, 굽힘, 압축과 같은 개별 변형 모드뿐만 아니라 두 개 이상의 모드가 동시에 결합된 변형까지도 감지가 가능한 다기능 소프트 센서를 개발했습니다.
이 기술을 이용하면 적은 수의 센서를 이용하면서도 많은 종류의 정보를 로봇에게 전달하는 것이 가능하다고 하는데요. 새로운 로봇 설계와 역학 분석을 통한 새로운 제조방법 개발 대해 중점적으로 이야기해보도록 하겠습니다.
1. 현재 교수님께서 하고 계시는 주요 연구에 대한 간단한 소개 부탁드립니다.
저희 연구실은 소프트 로봇을 구현하기 위한 다양한 기술들을 연구하고 있습니다. 유연한 구조 또는 형태를 갖는 로봇을 만들기 위해서, 액추에이터와 촉각/힘 센서를 부드러운 재질을 이용한 인공 근육과 인공 피부 형태로 개발하고 있습니다. 또한 이러한 소프트 로봇을 제어하기 위한 머신러닝 기반 알고리즘 개발도 진행하고 있습니다.
2. 최근 직관적이고 쉽게 원격으로 조작할 수 있는 소프트 센서를 개발하신 것으로 알고 있습니다. 교수님께서 연구하신 동작 감지가 용이한 소프트 센서 기술에 대한 자세한 설명 부탁드립니다.
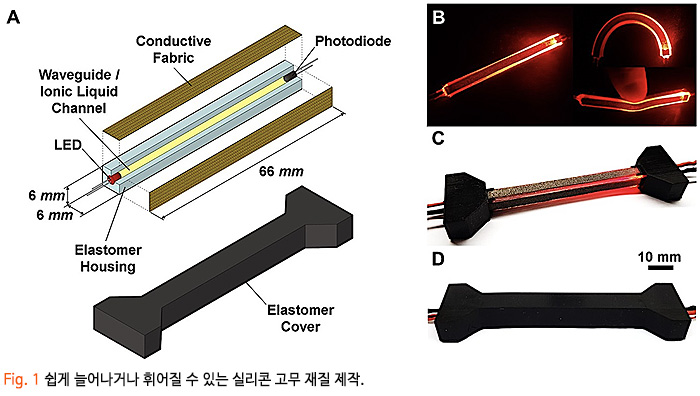
저희들이 최근에 개발한 센서는 인장, 굽힘, 압축과 같은 변형을 개별적으로 감지할 수 있을 뿐만 아니라, 두 가지 이상의 다중 변형이 동시에 결합된 경우도 변형의 종류와 크기를 측정할 수 있습니다. 이 센서는 쉽게 늘어나거나 휘어질 수 있는 실리콘 고무 재질로 만들어져 있는데, 가는 막대 형태의 구조 내부에 속이 빈 미세한 관(microchannel)이 있고, 이 관은 전기 전도성이 있는 투명한 이온 용액으로 채워져 있습니다.
그리고 센서 몸통 외벽에는 얇은 전도성 직물이 부착되어 있습니다. 이때 센서를 늘이거나 휘거나 누르면 변형 종류에 따라서 이온 용액의 빛 투과도와 전기 전도도, 전도성 직물의 전기저항 변화를 측정할 수 있는데, 이 신호들의 조합을 이용하면 다양한 종류의 변형을 동시에 감지하는 것이 가능합니다. 아래 그림에서와 같이 이러한 세 가지 센싱 메커니즘이 유기적으로 구조를 공유하고 있기 때문에, 구조적으로 매우 단순할 뿐만 아니라 제작 공정 또한 간단해 질 수 있습니다.
3. 개발한 센서 기술은 사람의 움직임을 방해하지 않으면서 다양한 변형을 쉽게 감지할 수 있다고 하는데요. 그 원리에 대해 설명 부탁드립니다.
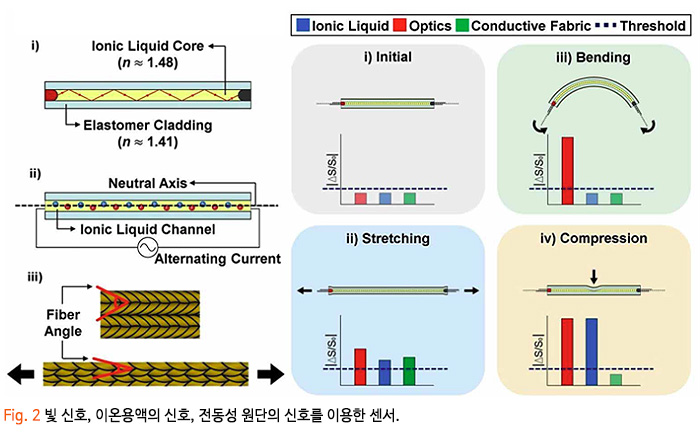
기본적으로 센서를 이루고 있는 재료가 유연성과 인장성이 뛰어난 실리콘 고무 재질이기 때문에 웨어러블 기기로 만들더라도 사람의 움직임을 저항하거나 방해할 가능성이 매우 낮습니다. 따라서 사람의 움직임을 그대로 감지하기에 큰 장점이 있습니다. 이번에 개발한 센서는 아래 그림 왼쪽에서 볼 수 있듯이 빛 신호, 이온용액의 신호, 전도성 원단의 신호 이 세가지를 이용합니다. 하지만, 이 세 가지 센서 신호가 변형 종류에 따라서 다른 반응을 보입니다. 오른 쪽 그림과 같이 굽힘 변형이 있을 때는 빛 신호만 반응을 하고, 인장
변형이 있을 때는 세 가지 센서가 모두 반응을 하고, 압축 변형이 있을 때는 빛 신호와 이온용액 신호 두 가지가 반응을 보입니다.
따라서, 어떤 신호가 감지되느냐에 따라서 어떤 변형이 센서에 가해졌는지를 추정할 수 있습니다. 거기에 더 해서 머신러닝 기술을 적용하면, 두 가지 이상의 변형이 동시에 가해진 것도 구분이 가능합니다.
4. 부드러운 로봇에는 여러 개의 소프트 엑추에이터 및 소프트 센서의 통합이 지향됩니다. 특히 액추에이터의 스케일러빌리티(scalability)가 매우 중요하다고 하는데요. 교수님의 견해를 듣고 싶습니다.
예, 맞습니다. 소프트 로봇은 정확한 모델링이 어렵기 때문에, 자세나 변형을 쉽게 추정 또는 제어하기가 어렵습니다. 따라서 여러 개의 소프트 센서와 액츄에이터가 쓰일 수 밖에 없습니다. 그러기 위해서는 작은 크기의 센서 또는 액추에이터의 개발이 필요하고, 이 때 scalability가 매우 중요한 요건이 됩니다. scalability를 위해서는 집적화와 모듈화가 필요하다고 생각합니다. 집적화는 작은 부품이나 회로를 제한된 공간에 배치 하기 위한 기술이고, 모듈화는 단위 형태의 액추에이터 또는 센서가 완성된 형태로 만들고 이러한 여러
개의 단위들을 조합해서 더 큰 또는 더 다양한 기능을 하는 시스템을 만들기 위한 기술입니다. 이 두 가지 기술을 구현할 수 있다면 훨씬 더 넓은 범위에서 소프트 로봇을 이용할 수 있을 것으로 기대합니다.
5. 연구하신 소프트 센서로 영화 ‘리어스틸’에서 본 동작 모방 로봇도 충분히 가능할 것 같습니다. 혹 보완해야할 점은 없는 건가요?
‘리얼스틸 (Real Steel)’은 제가 무척이나 좋아하는 로봇 영화 가운데 하나입니다. 훨씬 더 섬세한 동작을 감지할 수 있다면 사람의 움직임을 로봇이 흡사하게 모방을 할 수 있을 것으로 생각합니다. 그러기 위해서는 현재 개발된 센서 보다는 좀 더 정밀한 동작 감지가 가능해 져야 하고, 더 많은 움직임의 종류를 파악할 수 있어야 합니다. 이번 논문에서는 손목의 움직임으로만 로봇을 조작하는 시연을 했지만, 이러한 센서를 사용자의 전신을 확장해서 몸 전체의 움직임을 동시에 파악하는 연구도 진행 중입니다. 이러한
기술이 발전한다면
훨씬 더 부드럽고 정교한 사람의 움직임을 로봇이 재현할 수 있을 것으로 기대합니다.
6. 소프트 로봇은 조인트나 링키지가 정해져 있는 것이 아니기 때문에 수학적으로 모델링하기 힘들다고 하는데요. 지금은 어떤 제조기술 및 향후 발전 가능성에 대한 설명 부탁드립니다.
소프트 로봇은 기존의 로봇들을 능가하거나 대체하기 위해 나온 기술이라기보다는, 지금까지는 로봇을 사용하기에 어렵고 부담스러웠던 곳에도 앞으로는 로봇을 사용할 수 있도록 해 줄 수 있는 기술이라고 생각합니다. 예를 들면 산업용 로봇은 위험성이 크기 때문에 일상생활 보조에는 사용이 어렵습니다. 하지만, 비슷한 기능을 하는 로봇이라도 부드럽고 안전한 구조로 만들 수 있다면, 가정, 병원, 또는 학교와 같은 다양한 일상생활 환경에서 사람들을 도와주는 기능을 할 수 있을 것입니다. 따라서 소프트 로봇이 기존의
산업용 로봇과
비교해서 낮은 성능을 낼 수도 있지만, 앞으로는 인간의 삶과 훨씬 더 가까운 곳에서 사용될 가능성이 있습니다.
7. 나아가 심장 수술 안정성 높일 인공 근육 형태의 유연구동기도 개발하셨는데요. 관련 설명 부탁드립니다.
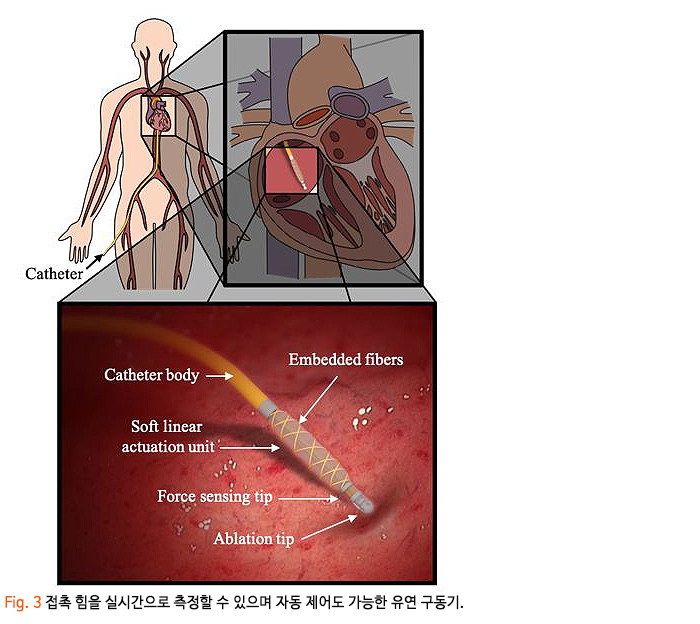
저희가 개발은 유연구동기는 심장 부정맥 치료에 사용되는 카테터 끝단에 장착되어 길이를 조절할 수 있는 장치입니다. 지름 1.5 mm, 길이 15 mm 정도 되는 고무튜브에 길이 방향으로만 늘어날 수 있도록 실과 같은 섬유를 내장시킨 구조입니다. 이 고무 튜브에 식염수를 주입하고 수압을 높이거나 줄이면 구동기의 길이를 조절할 수 있고, 이 구동기가 카테터 끝단에 장착이 되어 있으면, 심장 벽에 접촉 부위에 가하는 힘을 미세하게 조절할 수 있습니다. 또한 카테터 끝단이 심장 벽에 가하는 접촉 힘을 감지할 수 있는 유연 촉각 센서를
구동기 끝에 내장함으로써, 접촉 힘을 실시간으로 측정할 수 있을 뿐만 아니라 자동 제어도 가능합니다.
8. 코로나19 이후 로봇과 동료가 되는 세상이 머지않은 것 같습니다. 로봇의 미래 시대에 무엇을 준비해야 할까요?
로봇은 이미 우리들의 일상생활에도 많이 들어와 있습니다. 대표적인 예가 로봇 청소기와 AI 스피커입니다. 앞으로는 훨씬 더 다양한 종류의 로봇의 우리들의 삶에 들어와서 우리의 생활을 편리하게도 하고 재미있게 할 것으로 기대합니다. 그러기 위해서는 앞으로의 로봇들은 인간에게 안전해야 하고, 좀 더 자율적으로 인간과 상호작용을 할 수 있어야한다고 생각합니다. 따라서, 소프트 로봇의 하드웨어 기술과 소프트웨어 기술이 동시에 준비되어야할 것 같습니다.
9. 소프트로봇, 웨어러블 기술 등 상용화되기도 쉽지 않은데요. 가장 대표적인 국내기업과 국외기업이 어떤 제조 방식으로 연구되어 상용화되는지 궁금합니다.
현재 다양한 기업들이 소프트 로봇 산업에 뛰어들고 있긴 하지만, 아직은 실제 생활에 바로 적용할 만큼 상용화를 이룬 기업은 찾기 어렵습니다.
10. 교수님께서 생각하시는 소프트 로봇 개발을 활용한 여러 연구들에 대한 국내 상황과 국외 상황을 구체적으로 비교해주신다면 어떤 실정인가요?
소프트 로봇에 대한 연구가 본격적으로 시작된 지는 이제 겨우 10여년 정도 되었습니다. 비교적 짧은 시간이기 때문에 아직까지는 훨씬 더 많은 발전이 있어야할 것으로 많은 사람들이 생각하고 있고, 우리나라에서도 세계적인 연구과 기술개발 성과가 끊임없이 나오고 있습니다. 다만, 현재로는 소프트 로봇 기술을 이용한 창업과 제품화가 해외에서 조금 더 활발히 이루어지고 있기 때문에, 소프트 로봇 기술의 선도적인 위치를 계속 확보하기 위해서는 국내에서도 기술 이전과 사업화를 적극적으로 할 필요가 있습니다.
11. 연구 진행 중 어려운 점이 있었다면 어떤 점이었으며, 어떻게 해결해 오셨는지 알려주세요.
연구를 할 때 가장 어려운 점은 항상 새로운 문제와 아이디어를 찾아내야 하는 것 같습니다. 새로운 문제를 찾기 위해서는 끊임없이 논문을 읽고 특허들을 보면서 새로운 기술을 공부해야하는 것 같습니다. 현재 어떤 문제가 어디까지 풀려있는 지를 정확히 알고 있지 않다면, 좋은 연구를 하더라도 뒤처지는 경우가 있습니다. 또한 한 가지 문제를 풀기 위해서 오랜 시간 집중해야할 필요도 있습니다. 해결책이 한 번에 나오면 좋지만, 수많은 시행착오를 통해서 아주 조금씩 원하는 결과에 다가가는 경우가 많기 때문에 계속해서
흥미를
잃지 않으려는 노력도 필요합니다.
12. 미국 카네기멜론대 피츠버그의대와 어떤 공동연구를 하셨는지 궁금합니다.
저는 서울대학교에 오기 전에 미국 카네기멜론대학교 로봇공학과 (Robotics Institute)에서 교수로 있을 때부터 생체근육을 모사한 인공근육 개발과 팽창 가능한 외피가 장착된 로봇 팔 개발에 관한 연구를 했습니다. 그리고 서울대에 온 이후 최근까지도 관련 분야 공동 연구를 진행했습니다.
생체근육 모사 인공근육: 인간이나 동물의 근육은 힘을 내는 구동부 뿐만 아니라 근육의 수축 정도와 수축 힘을 감지할 수 있는 센서를 내장하고 있습니다. 이러한 근육의 구조에서 아이디어를 얻어서 움직임과 힘을 동시에 측정할 수 있는 센서를 내장한 공압 인공근육을 개발했고 이 논문은 2019년 Soft Robotics 표지논문으로 선정되었습니다.
J. Wirekoh, L. Valle, N. Pol, and Y.-L. Park, "Sensorized Flat Pneumatic Artificial Muscles (sFPAM) Embedded with Biomimetic Microfluidic Sensors for Proprioceptive Feedback," Soft Robotics, Vol. 6, No. 6, pp. 768-777, 2019.
J. Wirekoh and Y.-L. Park, "Design of Flat Pneumatic Artificial Muscles," Smart Materials and Structures, Vol. 26, No. 3, 035009 (10 pp.), 2017.

팽창가능 외피 장착 로봇 팔: 사람과 효과적으로 상호작용을 하기 위해서는 안전하면서도 친근한 형태로 로봇이 만들어져야 한다는 생각으로 가벼운 로봇 팔을 공압근육을 이용해서 구동했으며, 팽창과 수축이 가능한 외피를 제작해서 로봇 팔을 감싼 “Inflatable Robot”을 개발했습니다. 이 연구는 카네기멜론 대학교 Christopher Atkeson 교수님과 공동연구 결과입니다. 이 로봇은 미국 뿐만 아니라 한국 언론 (매일경제신문 2015.2.3) 에도 소개되었습니다.
P. Ohta, L. Valle, J. King, K. Low, J. Yi, C. G. Atkeson, and Y.-L. Park, "Design of A Lightweight, Soft Robotic Arm using Pneumatic Artificial Muscles and Inflatable Sleeves," Soft Robotics, Vol. 5, No. 2, pp. 204-215, 2018.

또한, 소프트 로봇 기술을 의료 분야에 적용하는 데도 관심이 있어서, 카네기멜론 대학교의 Cameron Riviere 교수님, 피츠버그 의대의 David Schwartzman 교수님, Samir Saba 교수님과의 공동 연구를 통해서 위에서 말씀드린 심장 시술용 카테터에 사용될 수 있는 힘 제어가 가능한 초소형 구동기 개발을 했습니다. 이와 관련된 최근 논문은 2021년 Soft Robotics 저널 표지논문으로 선정되었습니다.
초소형 심장 시술용 카테터 구동기:
N. Kumar, J. Wirekoh, S. Saba, C. N. Riviere, and Y.-L. Park, "Soft Miniaturized Actuation and Sensing Units for Dynamic Force Control of Cardiac Ablation Catheters," Soft Robotics, Vol. 8, No. 1, pp. 59-70 2021.
E. Aranda-Michel, J. Yi, J. Wirekoh, N. Kumar, C. Riviere, D. Schwartzman, and Y.-L. Park, "Miniaturized Robotic End-Effector with Piezoelectric Actuation and Fiber Optic Sensing for Minimally Invasive Cardiac Procedures," IEEE Sensors Journal, Vol. 18, No. 12, pp. 4961-4968, 2018.

13. 미국 하버드 대학교 Wyss 생체모방공학연구소에서는 어떤 연구를 하셨는지요.
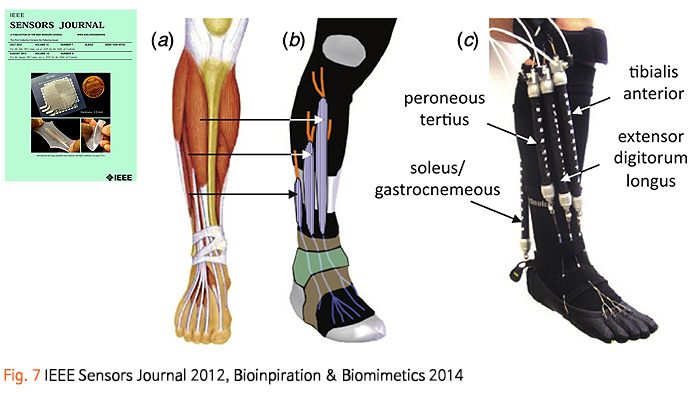
하버드 대학교 Wyss 연구소는 제가 다양한 변형을 측정할 수 있는 인공 피부형 소프트 센서 연구를 처음 시작한 곳입니다. 이 곳에서 한 인공 피부 연구가 이번 Science Robotics 논문의 시작이라고 할 수 있습니다. 액체금속을 얇은 실리콘 고무에 내장해서 실리콘 고무가 변형되는 정도를 전기저항의 변화를 통해서 감지할 수 있었고, 이 연구의 대표적인 논문은 2012년 IEEE Sensors Journal 표지논문으로 선정되었으며,
2013년에 최우수 논문상을 수상했습니다.
또한 이러한 인공피부 센서와 인공근육을 이용해서 소프트 웨어러블 로봇을 개발했습니다. 이 로봇의 특징은 사람의 발목을 움직이는 근골격계의 구조와 기능을 모사한 것으로 발목이 가지고 있는 자연스러운 움직임을 방해하지 않으면서도 3차원적인 움직임을 구현할 수 있다는 장점이 있습니다.
소프트 센서 (인공 피부) 논문:
Y.-L. Park, B. Chen, and R. J. Wood, "Design and Fabrication of Soft Artificial Skin Using Embedded Microchannels and Liquid Conductors," IEEE Sensors Journal, Vol. 12, No. 8, pp. 2711-2718, 2012.
Y.-L. Park, C. Majidi, R. Kramer, P. Berard, and R. J. Wood, "Hyperelastic Pressure Sensing with a Liquid Embedded Elastomer," Journal of Micromechanics and Microengineering, Vol. 20, No. 12, 125029 (6 pp.), 2010.
소프트 웨어러블 로봇 논문:
Y.-L. Park, B. Chen, N. Perez-Arancibia, D. Young, L. Stirling, R. J. Wood, E. C. Goldfield, and R. Nagpal, "Design and Control of A Bio-Inspired Soft Wearable Robotic Device for Ankle-Foot Rehabilitation," Bioinspiration & Biomimetics, Vol. 9, No. 1, 016007 (17 pp.), 2014.
14. 이런 연구에 힘입어 앞으로 연구 계획 중인 연구나 또 다른 목표가 있으신지 궁금합니다.
이번 연구를 계기로 웨어러블 로봇에 대한 연구에 좀 더 집중하고 싶습니다. 일상생활에서 당할 수 있는 크고 작은 부상들을 웨어러블 로봇을 이용해서 미연에 방지할 수 있거나, 부상 또는 장애가 있는 사람이 로봇을 착용함으로써 활동이 좀 더 자유로와질 수 있는 기술이 개발된다면, 많은 사람들의 삶의 질을 높일 수 있을 것으로 기대합니다.
15. 앞으로 관련 분야를 공부하는 후학(대학원생들)에게 이 분야의 연구에 대한 비전을 제시해 주신다면.
앞으로 소프트 로봇의 활용분야는 무척이나 클 것으로 기대하고 있습니다. 소프트 로봇은 인간의 삶에 가장 가까이에 들어와서 인간과 상호작용을 하고 일상생활에 바로 도움을 줄 수 있는 기술이라고 생각합니다. 오래 전에 personal computer (PC) 라는 용어가 처음 나왔을 때는 개인용 컴퓨터라는 개념이 무척이나 생소하지만 획기적이었습니다. 하지만, 이제는 누구나 컴퓨터를 사용하는 시대가 되었습니다. 앞으로는 로봇도 이와 같을 것으로 기대하고 있으며, 이를 위해서는 소프트 로봇 기술의 개발이 필수적이라고 생각합니다.
|




















