배준범 교수(UNIST 기계공학과) / jbbae at unist.ac.kr
2021-07-01
MBC에서 방영된 VR 다큐멘터리 ‘너를 만났다’에서 남편이 3D로 구현된 사별한 아내를 가상공간에서 만났습니다. 아내와 함께 손을 잡고 춤을 추거나 돌탑을 쌓는 장면이 가장 인상 깊었는데요. 이 때 UNIST 배준범 교수가 창업한 ㈜필더세임(Feel the Same)에서 개발한 몰리센 핸드(Mollisen HAND)라는 소프트 센서 글러브가 사용되었습니다.
오늘 인터뷰에서 만나 보실 배준범 교수(UNIST 기계공학과)는 실험실에서 개발한 소프트 센서 기술을 이용하여 ㈜필더세임을 창업하여 하이플렉스(HiFLEX)라는 소프트 센서, 몰리센 핸드(Mollisen HAND)라는 손가락 움직임 측정 소프트 센서 장갑, 힙플렉스(HipFLEX), 홈플렉스(HomeFLEX)라는 홈트레이닝 시스템, 서비스를 개발했습니다. 사람과 사람, 사람과 기계를 연결해주는 혁신적이고 실용적인 착용형 시스템에 대해 연구하는 배준범 교수와 이야기해보도록 하겠습니다.
1. 현재 교수님께서 하고 계시는 주요 연구에 대한 간단한 소개 부탁드립니다.
저희 실험실에서는 착용형 인간-로봇 상호작용 시스템, 소프트 로봇, 생체 모방 로봇에 대한 연구를 수행하고 있으며, 이를 활용하여 VR/AR, 원격 조종, 재활 등에 적용하고 있습니다. 실험실은 크게 4개의 연구그룹으로 나뉘어 연구를 수행하고 있는데, 1) Tele-operation 그룹, 2) Soft Wearable 그룹, 3) VR/AR, Rehabiliation 그룹, 4) Bio-inspired Robot 그룹입니다. 너무 다양한 연구를 하는 것 아니냐고 생각하실 수도 있겠지만, 1)~3) 연구는 적용 분야에 따라 나누어졌을 뿐 착용형 시스템이라는, 2)와 4)는 소프트 로봇이라는 연구 철학을 공유하고 있습니다. 그리고 각 그룹의 연구는 세미나를 통해 공유되고 있으며, 각 그룹의 연구 성과들이 다른 그룹의 연구에도 사용되기도 합니다.
Tele-operation 그룹에서는, 위험한 사고 현장 등에 로봇이 투입되고, 원거리의 조종자가 마치 로봇이 있는 곳에 있는 것처럼 느끼며 복잡한 작업 수행이 가능하도록, 직관적이고 상호작용이 가능한 인터페이스를 개발하고 있습니다. 이를 위해 다양한 웨어러블 센서를 조종자의 몸에 부착하고, 조종자의 양팔, 머리, 손가락 등의 움직임을 측정하여 로봇이 사람의 움직임과 똑같이 움직일 수 있도록 합니다.
또한, 로봇이 보는 시야, 로봇의 손, 팔에 전달되는 힘을 조종자에게 손, 팔 햅틱 시스템으로 전달하고, 바람, 열 등의 정보도 전달합니다. 이러한 시스템 개발을 위해서 사람, 로봇의 여유자유도 시스템의 기구학적 분석 및 실시간 계산, 웨어러블 센서 시스템 개발 및 인터페이스 통합, 손가락, 팔 햅틱 시스템 제작 및 제어, 성능 검증 실험 등의 다양한 연구가 필요합니다.
저희가 개발한 시스템의 이름은 interActive and intuitiVe control interfAce for a Tele-operAted Robot (AVATAR) 시스템이라고 하며, 2016년 국민안전처 장관상, 2017년 미래창조과학부 장관상을 수상하기도 했고, 다수의 언론에 소개되기도 하였습니다. 최근에는 ANA Avatar XPRIZE라는 국제 로봇 대회에 참여하고 있으며 준결승에 진출한 상태입니다.
AVATAR 시스템 설명 영상
Soft Wearable 그룹에서는 기존의 착용 시스템들이 갖고 있는 한계를 극복하기 위한 소프트 구조, 재료를 이용한 웨어러블 시스템을 연구하고 있습니다. 외골격으로 대표되는 기존의 착용 시스템은 무겁고 딱딱한 구조 때문에 착용이 어려워서 널리 사용되고 있지 못하고 있습니다. 이를 극복하기 위해 부드러운 재료를 이용한 소프트 센서/히터, 오리가미 등의 구조를 이용한 구동기, 다양한 재밍 구조를 이용한 가변 강성 시스템 등의 연구를 수행하고 있습니다.
이러한 결과들은 저희 실험실의 AVATAR 시스템에도 사용되고, 소프트 센서 장갑으로 측정된 손가락 움직임을 머신 러닝을 이용하여 수화를 번역하는 알고리즘을 개발하는 등 다양한 확장 연구를 수행하고 있습니다.
또한, ㈜필더세임을 창업한 소프트 센서의 원천 기술이 개발되기도 하였습니다.
소프트 센서로 만든 햅틱 장갑(센서+열+진동)과 VR 환경에의 적용:
소프트 센서 장갑과 머신 러닝을 이용한 수화 번역 시스템:
VR/AR, Rehabilitation 그룹에서는 VR/AR 환경에서 가상의 사람, 물체와 상호작용을 하기 위해 가장 중요한 손에 착용할 수 있는 시스템을 개발하고 있습니다. 손가락에 간단하게 착용할 수 있지만, 손가락의 3차원 움직임을 모두 측정할 수 있으며, 손가락에 다양한 힘 전달이 가능하여, 가상 물체의 딱딱함과 부드러움까지 전달할 수 있는 시스템을 개발하였습니다.
현재 개발된 시스템은 AVATAR 시스템에서도 사용되고 있습니다. 이러한 손 착용형 시스템은 손 재활이 필요한 환자의 상태 평가를 위해서도 적용되었으며, 재활기기 전문 기업에 기술 이전되기도 하였습니다. 또한, 사람의 동작을 이용하여 AR에서 산업용 로봇의 움직임 궤적을 설정해주고, 실시간으로 다양한 상호작용이 가능한 시스템도 개발하고 있습니다.
착용형 손 역감 전달 시스템:
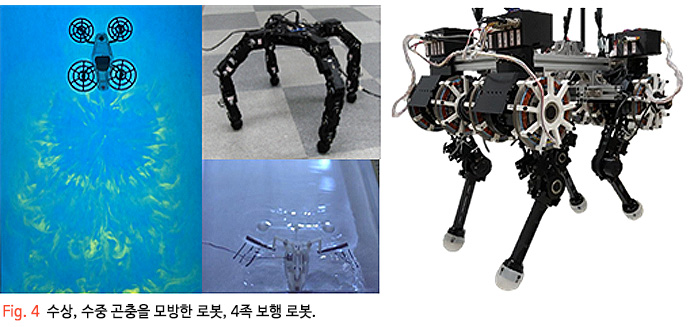
Bio-inspired Robot 그룹에서는 자연계에 존재하는 다양한 동물, 식물의 구조, 기능을 공학적으로 해석하여 구현, 검증하는 연구를 하고 있습니다. 대표적으로는 수중, 수상에서 움직이는 작은 곤충들의 구조, 움직임을 모방한 로봇들이 있고, 4족 보행 로봇도 개발하여 안정적인 보행 알고리즘, 로봇 주변 물체 인식 및 보행 경로 생성 등의 연구도 수행하고 있습니다.
2. 소프트 센서를 제작을 위해 다이렉트 잉크 라이팅(Direct Ink Writing:DIW) 방식 연구를 하셨다고 하는데, 다이렉트 잉크 라이딩 제작 방법이 무엇인가요?
실험실에서 많은 형태의 착용형 시스템을 개발하면서 느꼈던 점은 무엇보다도 사람이 착용하기 편리해야 한다는 것이었습니다. 다양한 착용 구조, 센서, 구동기에 대해 연구하면서, 착용형 시스템에 필수적인 착용 구조 자체에 센서 기능을 넣으면 착용에 대한 불편함, 거부감은 최소화하면서 정확한 움직임 측정이 가능할 것이라고 생각했습니다. 이러한 개념이 소프트 로봇에서 말하는 체화지능(embedded intelligence)라고 할 수 있고, 저희 실험실의 소프트 센서 연구는 이러한 목적, 개념으로 시작하게 되었습니다.
소프트 센서는 재료, 제작 방식에 따라 많은 방법이 국내외에서 활발하게 연구되고 있습니다. 그 중에서 저희는 액체 금속의 패턴을 이용한 전기 저항식 소프트 센서 연구를 하였고, 그 이유는 제작 방법이 간편하면서 다양한 크기, 모양의 센서를 만들 수 있는 확장성이 많다고 생각했기 때문입니다.
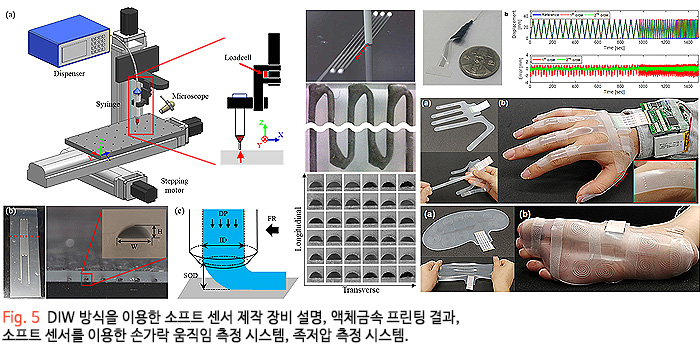
하지만, 액체 금속의 패턴을 이용한, 기존의 센서 제작 방법은 사람 손 기술이 너무 많이 필요한 것이라서 만드는 사람에 따라, 심지어 같은 사람이 만들어도 그 성능이 일정하지 않았습니다. 이를 극복하기 위해 액체 금속을 프린팅하는 Direct Ink Writing(DIW) 기술도 연구되고 있었지만, 공정, 센서 성능에 대한 연구는 충분하지 않았는데, 저희 실험실에서는 DIW 방식에 대한 연구를 하여, 소프트 센서가 원하는 성능을 갖고, 신뢰성 있게 제작될 수 있도록 하는 방법을 개발하였습니다.
또한, 소프트 센서 신호를 외부에서 받으려고 할 때 어떤 부분에서는 딱딱한 부품과 연결이 되어야 하는데, 기존에는 이러한 연구가 충분치 않아서 소프트 센서를 실제 활용하기 어려웠지만, 저희 실험실에서는 DIW를 이용하여 소프트 센서를 딱딱한 부품과 잘 연결할 수 있는 기술도 개발하였습니다.
DIW 기술 설명 영상:
3. 소프트 센서 기술을 이용하여 몰리센 핸드(Mollisen HAND)라는 손가락 움직임 측정 장갑을 만들었다고 들었는데, 장갑에 대한 소개 부탁드립니다.
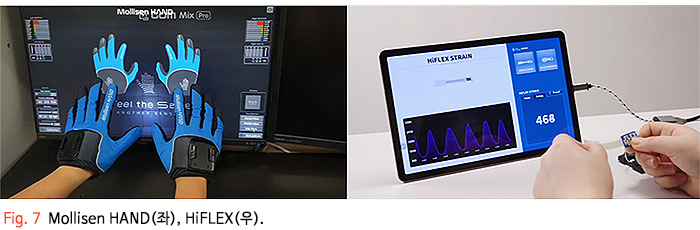
이렇게 개발된 소프트 센서 제작 기술을 기반으로 ㈜필더세임이라는 기업을 2017년에 창업하였고, 회사에서는 소프트 센서의 성능을 극대화시켜줄 수 있는 착용 구조, 소프트웨어와의 연동 등에 대한 추가 연구를 통해 HiFLEX라는 소프트 센서와 몰리센 핸드(Mollisen HAND)라는 소프트 센서 장갑을 개발하였습니다.
Mollisen이라는 단어는 제가 직접 만든 단어인데, 라틴어로 soft를 뜻하는 mollis와 센서를 뜻하는 sensorem을 합쳐서 소프트 센서라는 의미로 만들었습니다. 이 장갑에는 10개의 소프트 센서가 프린팅 공정을 통해 하나의 구조에 들어있어, 간단히 장갑을 착용하여 다섯 손가락의 움직임을 측정할 수 있으며, 손가락 끝의 누르는 힘을 측정하는 압력 센서, 손가락 끝에 진동을 전달해주는 진동자도 추가가 가능합니다.
이 모든 기능들이 많은 센서들을 단순히 구조에 붙이고 연결하는 것이 아니라, 소프트 센서 프린팅 기술을 통해 한 번에 제작되어 사용자에게 착용 구조에 내장된 센서의 이물감을 최소화하여 착용성을 좋게 하고, 정확한 움직임 측정을 가능하게 합니다.
(주)필더세임 회사 소개 영상
4. 손은 작고 섬세한 신체부위이기 때문에 다수의 센서를 부착하기 어렵고 손 움직임에 대한 니즈가 많다고 하는데요. 사람처럼 손작업을 구현하기 위해 최적의 설계 방법이 무엇이라고 생각하시는지 궁금합니다.
사람의 손가락은 골격 구조 측면에서 기구학적으로 매우 복잡하고, 손에 있는 근육뿐만 아니라 팔에 위치한 많은 근육들이 사용되며, 매우 민감한 감각 기능을 갖고 있습니다. 사람은 손과 손가락을 이용하여 정말 많은 활동을 하는데, 만약 손, 손가락이 없다면 우리의 대부분의 일상생활이 어려울 것이라는 것은 쉽게 상상해볼 수 있습니다.
사람의 손, 손가락 움직임을 측정할 수 있고, 다양한 감각을 전달할 수 있다면 기존과는 차원이 다른 인터페이스를 구현할 수 있을 것입니다. 마치 키보드만 사용하던 시대에 마우스가 처음 생겼을 때의 충격처럼 말입니다. 영화 ‘마이너리티 리포트‘에서 손과 홀로그램을 이용하여 영상을 편집하는 장면이 인상 깊었는데, 영화가 나온지 거의 20년이 다 되어가지만 이러한 시스템이 개발되지 못한 것은 손, 손가락의 움직임을 정확하게 측정할 수 있는 인터페이스의 부재 때문이라고 생각할 수 있습니다.
손가락의 움직임을 간단한 방법으로 측정하려는 시도는 많이 있었습니다. 크게는 카메라를 이용한 방법과 착용 시스템을 이용한 방법으로 나눌 수 있는데, 카메라를 이용한 방법은 VICON으로 대표되는, 사람의 신체에 마커를 부착하고 카메라를 이용하여 움직임을 측정하는 방법입니다. 모션 캡쳐를 위해 가장 정확한 방법으로 알려져 있어 영화 등에서 많이 사용되긴 하지만, 전신의 큰 움직임을 측정하는 것은 괜찮지만, 손가락은 워낙 많은 관절을 갖고 작은 움직임이 가능 때문에, 손가락에 부착된 마커가 가려지는 문제,마커들 사이의 신호 간섭 문제 등이 있습니다.
KINECT, Leap Motion 등의 제품은 사용자에게 마커를 부착하지 않지만, 정확도가 떨어지거나 움직임 범위가 제한되는 문제가 있습니다. 최근, Occulus에서 HMD(Head mounted display)에 부착된 카메라로 측정한 이미지만을 이용하여 손가락 움직임을 측정하는 방법도 개발되었지만, 손가락에 적절한 피드백을 줄 수 없어 다양한 상호작용이 어렵습니다.
착용형 센서를 이용하는 방법은 IMU(inertial measurement unit, 관성센서)나 필름 형태의 휘어짐 측정 센서, 스트레치 센서를 활용하는 것인데, IMU는 지자계를 사용하기 때문에 센서 신호 자체의 신뢰도가 부족하며, 필름 형태의 휘어짐 측정 센서는 1 자유도의 움직임만 측정 가능하며 다수의 센서를 연결해야하기 때문에, 손가락의 정확한 움직임 측정을 위해서는 시스템 자체가 너무 커져서 착용을 오히려 어렵게 만듭니다. 늘어날 수 있는 스트레치 센서를 사용한 시스템도 최근 출시되었지만, 센서 민감도가 높지 않으며, 제작 방식의 한계로 다양한 크기, 모양으로 만들기 어렵습니다.
저희가 개발한 소프트 센서 시스템은, 센서 자체가 부드럽고 신축성이 있기 때문에 사용자가 착용하는 시스템에 사용했을 때 사용자가 이물감을 느끼지 않을 수 있고, 프린팅 궤적을 바꿔서 다양한 크기, 기능을 넣을 수가 있어서 다기능의 착용 시스템을 만들 수 있습니다. 소프트 센서를 이용하여 손가락 움직임 측정 시스템을 만들 때도 손가락의 복잡한 구조를 고려하면서 소프트 센서의 성능을 최대화 시켜줄 수 있는 착용 구조 설계를 해야 하고, 사람이 간단하게 착용할 수 있도록 해야 합니다. 또한, 센서 캘리브레이션(calibration) 작업도 간단히 할 수 있으며, 컴퓨터 등 주변 기기와도 쉽게 연결할 수 있는 프로그램도 같이 개발되어야 합니다.
5. 창업하신 ㈜필더세임(Feel the Same) 회사의 활동 중 실제 VR 게임방에서 소프트 센서 글러브를 사용하고 있다고 들었습니다. 최근 회사에서 제작하고 있는 것이 무엇이며 그 외 개발된 프로그램이 어떤 것들이 있는지 궁금합니다.
㈜필더세임에서 개발한 Mollisen HAND 장갑을 이용하면 5 손가락의 10개의 관절 움직임을 실시간으로 정확하게 측정할 수 있을 뿐만 아니라, 손가락 끝의 압력 측정, 손가락 끝에 진동 전달도 가능하여, 사용자의 움직임을 가상세계에 전달해주고, 가상세계에서 발생한 정보를 사용자에게 전달할 수 있습니다. 예를 들어, 기존의 가상현실 기기들은 리모컨 형태의 컨트롤러를 사용했는데, 이를 이용하면 가상공간의 내 손은 물건을 잡는 동작을 하는데, 실제 내 손은 버튼을 누르는 동작을 하고 있어서 가상현실의 몰입감이 떨어질 뿐만 아니라 가상공간에서 복잡한 동작을 하기 어렵습니다. 하지만 Mollisen HAND를 사용하면 사용자의 현실에서의 움직임과 가상공간에서의 움직임이 일치하기 때문에, 생생한 몰입감을 느끼며 다양한 동작들을 가상공간에서 구현할 수 있습니다. 또한 가상 물체를 만졌을 때의 감각을 진동을 이용하여 전달할 수 있기 때문에 더욱 생생한 가상현실 구현이 가능합니다.
이러한 성능을 인정받아 저희 소프트 센서 장갑은 다양한 가상현실 어플리케이션에서 사용되고 있습니다. 대표적인 예가, 올해 1월 MBC에서 방영된 VR 다큐멘터리 ‘너를 만났다‘인데요, 여기에서는 사별한 부인을 가상현실 기술을 이용하여 만나는 것이 방송되었는데, 저희 장갑이 사용되어 가상공간의 부인과 손을 맞잡고, 돌탑을 함께 쌓는 등의 동작을 할 수 있었고, 이 동작들은 모두 손가락의 정확한 움직임 측정이나 감각 전달이 없다면 불가능한 것들입니다. 이 외에도 가상현실에서 헬리콥터, 자동차를 수리하는 트레이닝을 해줄 수 있는 프로그램도 개발이 되었고, 저희 장갑을 이용한 VR 방을 운영하던 회사에서는 호러 방탈출 게임을 개발하여 서울 강남점, 부산 해운대점에서 실제 고객들에게 서비스를 하기도 하였습니다. 간단하게 착용하여 정확한 손가락 움직임 측정이 가능하기 때문에, 버추얼 유투버(캐릭터를 이용한 유투버)들도 저희 장갑을 사용하고 있습니다.
Mollisen HAND 이 외에도 다양한 분야에 소프트 센서를 적용하고 있습니다. 저희는 소프트 센서를 홈트레이닝 시스템으로 개발하고 있는데, HipFLEX와 HomeFLEX 시스템이 그것입니다. 코로나 사태로 인해 홈트레이닝 시장이 매우 커지고 있는데, 미국의 펠로톤(Peloton)이라는 회사가 대표적입니다.
이 회사는 실내 자전거 시스템을 이용하여 온라인으로 트레이너와 함께, 다수의 사용자들과 함께 운동할 수 있도록 하여 재미있고 효율적인 홈트레이닝이 가능합니다. 저희 회사에서 개발한 소프트 센서를 홈트레이닝에서 사용되는 소도구에 부착하여 재미있고 효과적인 홈트레이닝이 가능한 시스템을 HomeFLEX라는 이름으로 개발하고 있고, 초기 제품으로 HipFLEX라는 힙밴드를 개발하고 있는데, 스쿼트 등의 하지 운동에 사용할 수 있으며 운동 상태를 소프트 센서를 통해 모니터링하고, 온라인 트레이너, 다수의 사용자와 함께 할 수 있는 시스템입니다.
이 외에도 업체들과의 NDA 때문에 다 밝힐 수는 없지만, 소프트 센서를 자동차, 로봇 등의 분야에 활발히 적용하고 있습니다.
6. 코로나로 인해 언택트 시대에서 2021년 메타버스에 대한 전 세계 기대가 높습니다. 교수님께서 생각하시는 메타버스 생태계는 언제 충분히 성숙될 것 같습니까?
최근 VR/AR을 넘어서 메타버스라는 말도 나올만큼 언택트 생태계가 커지고 있고, 메타버스 관련 업체들도 많이 성장하고 있습니다. 이는 3D 세계를 이질감 없이 구현해줄 수 있는 컴퓨팅, 디스플레이 기술이 충분히 발전되었고, 5G가 상용화될 정도로 네트워크 속도도 빨라졌기 때문입니다. 또한, 이를 프로그래밍해줄 수 있는 프로그램 엔진들도 많이 발전되었고, 무엇보다도 2007년 아이폰이 처음 나왔을 때의 기억을 가진, 이러한 환경에 익숙한 세대들이 이제 20대에 서서히 접어들고 있기 때문입니다.
국내외에서 메타버스에 대한 서비스도 많이 출시되고 있는데, 가상 환경에서의 SNS, 엔터테인먼트 등이 그 예라고 할 수 있겠습니다. 혹자는 예전의 싸이월드, 혹은 페이스북에서 이미 하던 것을 3D로 하는 것 아니냐고 폄하할 수도 있지만, 로블록스(ROBLOX)에 익숙한 새로운 세대들에게는 이것이 당연하게 받아들여지고 있습니다.
이러한 세계를 더욱 확장시키기 위해서는 기존에 많이 발달되었던 소프트웨어 기술뿐만 아니라, 메타버스에서 다양한 상호작용이 가능한 인터페이스도 개발되어야 합니다. 초기에 출시되었던 무겁고 비싼 HMD가 최근 훨씬 가벼워지고 저렴한 가격으로 판매되며 VR 생태계가 확장된 것처럼, 사용자가 메타버스에 있는 것처럼 느끼고, 그곳의 사용자, 물체들과 직접 상호작용할 수 있는 시스템도 개발되어야 합니다. 저희가 개발한 Mollisen HAND는 사용자가 간단한 착용만으로 정확한 움직임 측정이 가능하며 감각 전달도 가능하기 때문에 메타버스 구현에 큰 기여를 할 것으로 생각합니다. 이처럼, 메타버스 구현을 위한 소프트웨어, 하드웨어의 기술적 발전, 이를 활용할 수 있는 사용자들이 증가되고 있기 때문에 메타버스 시장은 앞으로 큰 발전이 있을 것으로 생각됩니다.
7. 착용형 시스템 연구에 대한 국내 상황과 국외 상황을 구체적으로 비교해주신다면 어떤 실정인가요? 어디까지 발전되고 있는 건지 궁금합니다.
착용형 시스템은 산업, 군사, 재활 등의 목적을 위해 활발하게 연구되고 있습니다. 학계에서 연구된 결과들이 상용화에 이미 많이 사용되고 있으며, 국내외 많은 업체들이 상용화를 위해 노력하고 있습니다. 국내외 연구, 상용화 수준도 유사하다고 생각합니다. 다만, 일반 대중에게 널리 사용되기 위해서는 보다 간단하고, 착용이 편리하며, 가격이 저렴한 시스템이 개발에 대한 추가 연구가 필요하고, 그러한 시스템이 적용될 수 있는 큰 시장을 찾는 노력이 필요합니다.
8. UC버클리(University of California, Berkeley)에서 2008년 5월에 기계공학 석사, 2010년 5월에 통계학 석사, 2011년 5월에 기계공학 박사 학위 취득하셨는데요. 그 당시 어떤 연구를 하셨는지 궁금합니다.
박사 학위 기간 중에는 외골격 로봇을 이용한 하지 보행 재활 로봇, 하지 움직임 측정 시스템, 보행 분석 알고리즘 개발에 대해 연구하였습니다. 학술적으로는 시스템 설계, 제어, 로보틱스를 근간으로 하여 연구를 하였고, 외골격 시스템에 대한 연구를 하면서 다양한 착용 시스템을 시도해보며 그 가능성과 한계도 같이 알게 되었습니다.
또한, 개발한 시스템을 University of California, San Francisco 병원의 환자들에게 직접 적용해보며 이러한 기술들이 사람들에게 직접적으로 도움이 될 수 있다는 것도 알았고, 사용자 친화적인 시스템의 개발에 대해서도 많이 고민하게 되었습니다. 기계공학 학위 공부를 하면서, 확률, 통계적인 분석이 중요하다는 것을 알게 되어서 통계학 석사 학위도 취득하였으며, 이 때 공부한 확률, 통계 지식이 최근 각광받는 머신러닝 기법들을 저희 연구에 적용하는데 사용하고 있습니다.
9. 이런 연구에 힘입어 앞으로 연구 계획 중인 연구나 또 다른 목표가 있으신지 궁금합니다.
착용형 시스템은 사람의 신체 능력뿐만 아니라, 인지, 감각 능력을 키워줄 수 있습니다. 영화 ‘아바타‘를 보면 다리를 쓰지 못하는 사람이 다른 생물학적 아바타를 통해 움직이고, 감각을 느끼며 다양한 활동을 하는 것을 볼 수 있습니다. 또한, 이 아바타 시스템과 싸우는 기계 아바타인 로봇을 보면 사용자의 움직임을 이용하여 조종되는 것을 알 수 있습니다.
현재 저희가 연구하는 착용 시스템은 기계 아바타 시스템이며, 보다 향상된 착용성과 측정 정확도, 다양한 감각 전달을 위해 소프트 웨어러블 시스템, 소프트 구동기, 머신러닝 알고리즘 등을 연구하고 있습니다. 하지만, 앞으로는 생물학적 아바타 시스템에 대해서도 연구하고 싶고, 이를 위해 BMI(Brain-Machine Interface), 생체통합 시스템에 대한 연구도 수행하려고 합니다.
10. 앞으로 관련 분야를 공부하는 후학(대학원생들)에게 이 분야의 연구에 대한 비전을 제시해 주신다면.
인간의 신체, 감각, 인지 능력을 신장시키고 이를 통해 인류 삶의 질을 향상시키는 것은 과학, 공학 기술을 발전시키는 근본적인 목적 중의 하나입니다. 착용 시스템은 이러한 목적을 달성할 수 있는 핵심 기술이고, 최근 급격하게 발전하고 있는 머신러닝, 웨어러블 컴퓨팅 등과 함께 시너지를 낼 수 있는 분야라고 생각합니다.