


박우근 (Feel the Same, Inc)
2022-05-09
|
일상생활에서 활용 가능한 로봇 기술은 특정한 동작을 반복적이고, 빠르고, 정확하게 수행하기 위해 그리퍼, 매니퓰레이터 등 다양한 형태로 개발되어왔다. 특히, 로봇의 고반복, 고정밀, 고하중 작업 수행을 위해 로봇 매니퓰레이터는 실질적인 작업 수행을 위해 가장 중요한 구동 시스템이다. 작업 형태와 작업환경의 크기에 따라, Fig.1과 같이 SCARA 로봇, 스튜어트 플랫폼, 다자유도 로봇팔 등 다양한 형태로 개발되어왔고, 주로 전기모터, 유압 실린더 등의 딱딱한 구동기로 구동되는 형태이다. 강성 소재로 이루어지고, 전기모터, 유압 등의 높은 출력을 이용해, 고반복, 고정밀, 고하중 작업을 수행하기에 적합해, 다양한 산업 현장에서 활용되고 있다. 하지만, 사람과 상호작용이 많은 일상생활에 활용되기에는 충돌이나 오작동시, 큰 위험이 될 수 있고, 작업환경이 한정적이라는 한계가 있었다.  강인한 움직임을 위해, 기계적인 유연성이 낮지만, 고정밀, 고반복, 고하중 움직임을 갖는 매니퓰레이터가 개발되어져 왔지만, 위험성, 부족한 작업반경 등의 문제가 있었고, 이를 해결하기 위해, 기계적인 유연성을 높이고, 인간의 신체를 모방한 로봇 팔, redundant 구동 기반의 매니퓰레이터 등이 개발되어져 왔다. 이 밖에도, 부족한 기계 구조적인 유연성을 해결하고, 안전한 상호작용을 위한 다양한 적응 제어 이론들이 함께 개발되어져 왔다. 기존의 강성 소재 기반 매니퓰레이터의 문제점을 해결하기 위해 로봇 연구자들은 Fig.2와 같은 매니퓰레이터 자체의 구동 메커니즘 연구, 안전한 구동을 위한 제어 알고리즘 연구 등 다양한 연구를 수행해왔다. 기존의 딱딱한 매니퓰레이터의 경우, 각 관절별로 모터가 있어 높은 inertia를 갖는 문제가 있었는데, 케이블 구조와 스프링 기반 중력보상 메커니즘을 이용해 구동 모터를 로봇팔 외부로 옮겨, 매니퓰레이터 자체의 moment of inertia를 낮추는 연구가 수행됐고, 로봇과 사람의 접촉력 제어를 위한 Time delay control 기반의 임피던스 제어 알고리즘을 적용하는 연구들이 개발되어왔고, 이 밖에 안전을 감지하기 위한 다양한 AI 기반 제어 기술 등이 개발되어 왔다. 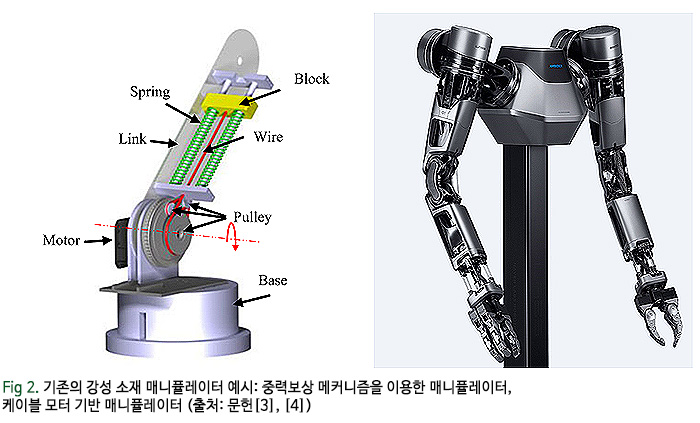 하지만, 이러한 강성 소재 기반 매니퓰레이터의 근본적인 문제 해결을 위한 노력으로, 부드러운 소재 기반의 소프트 구동기가 다양한 형태로 개발되어왔고, 매니퓰레이터로 적용되어왔다. 대표적으로, 소프트 로봇의 연구가 활발해짐에 따라, 기존의 non-redundant, redundant 매니퓰레이터에서 연성 소재의 높은 다자유도 특성을 이용해, 높은 적응성, 복잡한 움직임 등을 갖게 하는 매니퓰레이터로 발전해온 것으로 설명될 수 있다 (Fig. 3). 소프트 구동기 기반 매니퓰레이터를 인간의 일상생활에 적용하려는 노력에 따라, 자연계에 존재하는 다양한 동, 식물들의 구동 메커니즘을 모사하려는 노력이 있어왔고, 다양한 소프트 매니퓰레이터가 개발되기 시작했다. 많은 로봇 연구자들은 자연환경의 높은 적응성을 갖는 문어, 코끼리 코 등의 형상에서 많은 영감을 받아 소프트 매니퓰레이터 개발에 적용했는데, 특히, 높은 적응성을 갖는 문어는 소프트 매니퓰레이터를 연구하는 로봇 연구자들의 큰 관심 대상이었다. 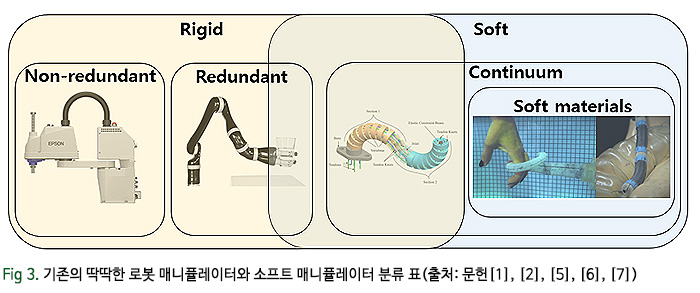 이탈리아 Sant’Anna 대학 연구팀은 문어의 muscular hydrostat 구조와 접착을 위한 빨판 구조를 모사해 비정형 환경에서 locomotion 등 다양한 로봇 작업을 수행하기 위한 소프트 매니퓰레이터를 개발했다. 수술용 로봇 분야에서는 영국의 킹스칼리지 대학 연구팀이 개발한 STIFF-FLOP는 공압 구동 기반 인공 근육을 이용한 매니퓰레이터 모듈을 연속체 형태로 구성해 기존의 수술 로봇을 대체하기 위한 시스템을 개발했다.  일반적인 소프트 매니퓰레이터는 부드러운 연성 소재로 이루어진 소프트 구동기를 원형 대칭으로 배치한 연속체 로봇의 형태로 개발되어왔다. 소프트 구동기는 EAPs (electroactive polymers), SMAs (shape memory alloys), 공압 구동기, 케이블과 모터를 이용한 구동기 등 다양한 구동 메커니즘에 의해 구현되어 왔지만, SMAs, EAPs에 의한 구동 메커니즘은 실질적인 로봇 작업을 수행하기 위해 충분한 힘을 구현하기 어려웠고, 일반적인 소프트 그리퍼는 주로 케이블과 모터를 이용한 구동방식, 공압에 의한 구동 방식이 주로 적용되어왔다.  1960년대부터 연구되어온 연속체 로봇은 주로 케이블과 모터에 의해 구동되는 방식으로, 케이블 라우터에 의한 힘 전달, 움직임 구현이 가능한 딱딱한 구조(backbone)를 연속체 형태로 구성되어 외부 환경에 적응하며 다양한 움직임, 로봇 작업을 수행할 수 있는 형태이다 (Fig. 4). 코끼리 코, 문어 다리 등 생물체 움직임을 모사해 비정형 환경에서 외부 환경에 적응하며 원하는 움직임, 성공적인 로봇 작업을 구현하기 위해, 수 밀리미터부터 수십 센티미터 까지의 다양한 지름을 같는 형태로 개발되어 왔다. 케이블에 의한 굽힘 움직임 구현을 위해, 강성 소재 기반 backbone이 필수적이지만, 비정형 환경에서의 작업 수행시, 원치 않는 충돌이 있어 상호작용하는 외부 환경에 안전문제를 야기할 수 있는 문제가 있다. 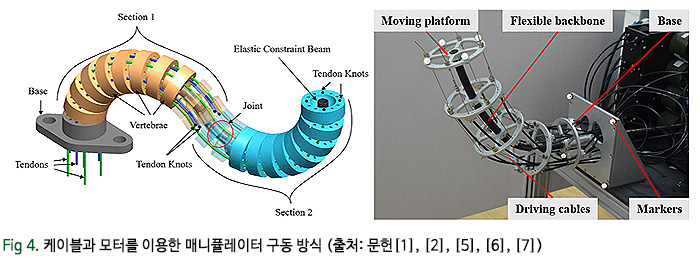 특히, 안전이 중요한 의공학 분야, 수술로봇 등의 분야에서 안전 문제를 해결하기 위해 추가적인 센서와 알고리즘을 이용하는 연속체 로봇 지능화 연구가 활발히 진행되어왔다. 공압을 이용한 소프트 매니퓰레이터는 코끼리의 코, 문어의 다리와 같은 자연환경의 유기체에서 영감을 받아, 연성 소재의 높은 적응성을 이용해, 기존의 강체 구조 기반의 연속체 로봇을 대체하는 소프트 매니퓰레이터가 개발되기 시작했다. 특히, 매니퓰레이터 모듈당 3, 4개의 소프트 공압 구동기로 이루어진 연속체 로봇의 형태로 개발되어, 구획화된 변형을 이용하는 방식으로 개발되었다. 각 구동 모듈에 Differential한 압력을 인가해, 전방향 굽힘, 선형 움직임 등을 구현한다. 일반적으로 STIFF-FLOP 구조와 같이, 구획화된 매니퓰레이터 모듈로 개발되어왔지만, honeycomb 구조, 에어 블래더 (air-bladder) 구조를 이용한 매니퓰레이터도 개발되었다.  예를 들어, Fig. 5(a)와 같이, 중국의 USTC 대학 연구팀은 벌집구조인 honeycomb 구조를 이용해 연속체 형태로 제작후, 내부에 공압 챔버를 삽입해 다양한 굽힘, 선형 움직임이 가능한 매니퓰레이터를 개발했다. 또한, 미국 버지니아텍 연구진들에 의해, 열접착 방식의 에어블래더 모듈을 이용해 회전, 굽힘 움직임등이 가능한 소프트 매니퓰레이터가 개발되기도 하였다. (Fig. 5(b))  연성소재의 특성상, 효율적인 힘 전달이 어렵고, 중력에 의한 처짐 현상, 실질적인 로봇 작업을 위해 payload가 낮은 문제점들이 있어, 이러한 문제점들을 해결하기 위한 추가적인 가변 강성 구조에 대한 연구에 대한 필요성이 대두되어왔다. 소프트 매니퓰레이터를 이용한 안전한 상호작용을 위해, 부드러운 연성 소재의 높은 적응성을 잃지 않으면서 높은 가반 중량을 가지는 로봇 기술은 소프트 로봇의 대중화를 위해 해결해야할 가장 중요한 요소이면서도 기존의 딱딱한 로봇의 안전성 문제를 해결하기 위해 획기적인 해결 방안이 될 수 있다. 가변강성 구조는 주로 로봇에 내장되어 작동하는 방식으로 개발되어왔고, 대표적인 가변강성을 위한 구동 방식으로는 1) 구조의 상호작용을 이용한 강성 변화, 2) 소재 자체의 전기화학적 특성을 이용한 강성변화로 나누어질 수 있다. 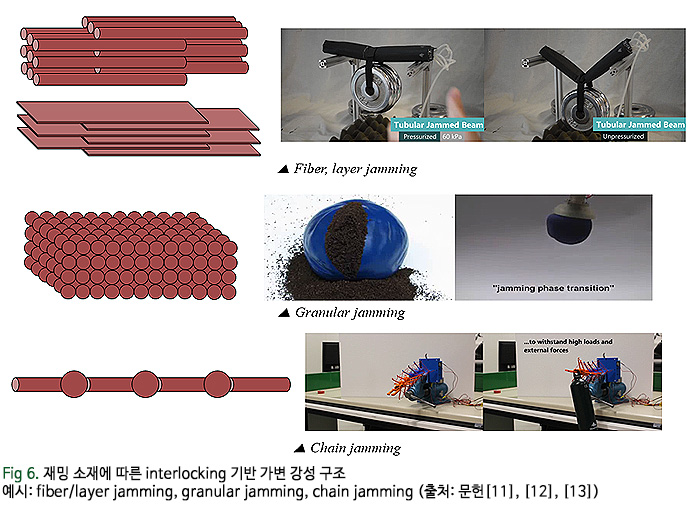 기계적인 구조의 상호작용을 이용하는 방식은 기계요소의 상호작용을 이용해 전체 로봇 구조의 강성이 안정적인 상태가 되도록 유지하는 메커니즘을 이용하며 대표적으로 재밍 (jamming) 방식이 적용되고 있다 (Fig. 6). 안정적인 상태를 유지하도록 가변강성 메커니즘 제어를 통해, 연속적인 강성상태를 구현할 수 있고, 비교적 빠른 구동이 가능하기 때문에 많은 소프트 로봇에 적용되고 있다. 재밍 메커니즘은 일반적으로 음압에 의해 공압 챔버 내 존재하는 물질들이 interlocking 하며 강성 변화를 구현한다. 경우에 따라, 음압이 아닌 케이블과 모터를 이용한 방식으로도 interlocking을 구현하는 가변강성 구조도 적용되어왔다. 케이블을 이용한 방식은 딱딱한 케이블 라우팅 구조를 이용하면 모터 토크를 이용해 높은 강성 변화 구현이 가능하다는 장점이 있지만, 높은 적응성을 위해 케이블 라우팅 구조가 부드러운 소재로 제작될 경우, 국부적으로 케이블에 의해 집중 하중이 발생해 찢어지는 문제가 발생될 수 있다.  재밍되는 소재에 따라, 작은 입자를 이용한 입자 재밍 (granular jamming), 얇은 레이어를 이용한 파이버, 레이어 재밍 (fiber, layer jamming), 딱딱한 체인 구조를 척추와 같이 구성해 interlocking 시키는 체인 재밍 (jamming)으로 분류될 수 있다. 일반적으로 입자를 이용한 재밍 구조는 외부 환경에 높은 적응성을 갖고, 주로 음압에 의한 빠른 구동 속도를 갖는 장점을 갖지만, 음압에 의한 구동이기 때문에 portable 로봇 적용이 어려운 단점을 갖는다. 대표적으로, STIFF-FLOP 구조는 소프트 공압 구동기를 이용해 다축 움직임을 구현하면서, 부족한 강성을 음압 기반 입자 재밍 구조로 보완하여, 최소 침습을 위한 복강경 수술 보조용 장치로 활용되고 있다. 딱딱한 재료의 interlocking 효과를 높여, 많은 가반 하중을 갖는 가변강성 구조는 주로 케이블-모터에 의해 구동되었다. 강성 소재로 이루어져, 텐세그리티 (tensegrity) 기반 척추 모듈을 이어붙여 케이블에 의해 interlocking됨에 따라 강성변화를 구현한다. 강성소재 기반의 가변강성 메커니즘을 이용하기 때문에, 높은 힘을 버틸 수 있다는 특징을 갖고 있지만, 소프트 매니퓰레이터와 결합되기에는 소재적 결합이 어려운 단점이 있다. 이 밖에, 두가지 이상의 재밍 메커니즘을 결합하는 하이브리드 재밍구조 등 가변강성 성능을 높이기 위한 연구도 활발히 수행되고 있다. (참고문헌 [14]) 전기화학적 특성을 이용해 가변강성을 구현하는 메커니즘은 주로, 고전압에 의해 구동되는 EAPs, 온도에 의해 변형되는 SMAs등을 실리콘 소재 내부에 삽입해, 가변강성을 구현한다. 하지만, 고전압이 필요하거나, 느린 구동속도, 부족한 가변강성 변화율 등의 문제가 있어 소프트 매니퓰레이터에는 거의 적용되지 못했다. 구동속도를 개선하거나, 저전압을 이용해 강성변화가 가능한 다양한 소프트 구동기가 개발되어오고 있어, 추후에는 이를 이용한 가변강성 소프트 매니퓰레이터에 적용될 가능성이 있다.  기존의 딱딱한 소재로 이루어진 연속체 로봇 형태의 매니퓰레이터와 달리, 소프트 매니퓰레이터는 연성소재로 이루어졌기 때문에, 고차원 움직임이 가능하지만, 그만큼 움직임 측정 방식이 어렵고, 정밀한(precise) 제어가 어려운 단점이 있다. 가장 어려운 문제점은 실시간으로 매니퓰레이터의 자세 또는 로봇 작업을 위해 주변 환경과 상호작용 정보(접촉, 힘 등)에 대해 정확히 측정하기 어려운 점이다. 따라서, 다양한 센서 기술과 결합 소프트 매니퓰레이터의 결합은closed-loop 제어를 위해 필수적이다. 센서 기술을 적용한 소프트 매니퓰레이터 연구는 크게 1) 매니퓰레이터에 내장되어, 매니퓰레이터의 자세, 접촉 정보 등을 측정하는proprioception, 2) 매니퓰레이터가 작용하는 외부 환경 센싱을 위한exteroception으로 분류될 수 있다.  Proprioception은 내장된 센서 신호를 이용해, 외부 환경에 따라 구동된 소프트 매니퓰레이터의 자세, 접촉 힘 등을 측정해, 작업을 수행하고 있는 외부 물체의 크기, 표면에 대해 판단한다. 결합되는 센서는 주로 이용되는 센서는 실리콘, 패브릭과 같이 신축성이 높고, 유연한 특성을 이용한 소프트 센서가 이용된다. 주로, 연성소재 내부에 위치한 전도성 소재의 저항, 정전용량 등을 측정해 외부의 물리적인 자극(외력, 인장 등)에 의해 변화하는 저항, 정전용량을 측정해 센서로 활용하고 있으며, 신축성을 이용한 웨어러블 센서 디바이스, 전자피부, 소프트 로봇 등에 결합되어 활용되고 있다. 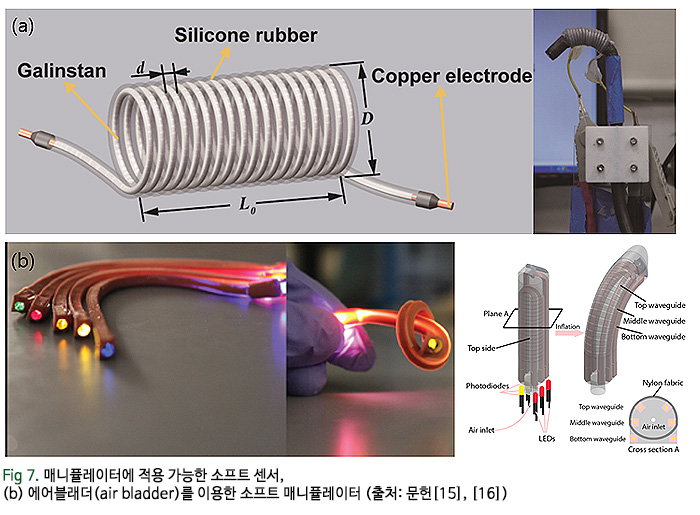 전도성 소재는 나노/마이크로 입자 기반의 소재(은 계열), 액체 금속 (갈륨-인듐 합금 계열) 등이 활용되고 있다. 전도성 소재의 저항, 정전용량 외에도, 광 도파관 (optical waveguide)을 연성체 내부에 삽입해 굽힘 측정 가능한 센서, 자기장 측정 센서를 이용해 연성체 내부에 삽입된 자석의 변형에 따라 자기장 변화를 측정하는 소프트 센서 등이 개발되고 있다.  Exteroception을 위한 센싱 방법으로는 주로 카메라 센서를 이용해, 로봇 작업이 수행되는 시각정보를 수집하거나, proximity 센서를 이용해 매니퓰레이터 외부 환경을 측정하는 방식이 적용되어 그리퍼를 이용한 성공적인 물체 파지나, 주변 환경에 적응하며 로봇 작업을 수행하기 위한 정보로 활용되어왔다. 카메라 이미지를 이용한 매니퓰레이터는 주로 AI기술과 접목되어, 강성이 낮은 소프트 매니퓰레이터의 모델링이 어려운 문제 해결을 위해, 다양한 머신러닝 알고리즘을 적용한 제어 알고리즘 등이 개발되어 왔다.  매니퓰레이터 기술은 로봇 기술이 일상생활에 적용되어 특정 작업을 수행하기 위해, 가장 필수적인 기술이다. 하지만, 기존의 강성 소재 기반의 매니퓰레이터는 재료의 한계상, 오작동시, 사람에게 위험이 될 수 있기 때문에, 소재적인 관점에서 이러한 문제 해결을 위해 부드러운 연성소재를 이용한 소프트 매니퓰레이터가 활발하게 연구되고 있다. 하지만, 소프트 매니퓰레이터의 연성소재의 낮은 강성으로 인해, 높은 가반하중을 갖기 어려워 실제적인 작업을 수행하기 어려움이 있었다. 따라서, 소프트 매니퓰레이터의 가반 하중을 높이거나, 힘 전달율을 높이기 위해 다양한 가변강성 구조가 개발되어왔다. 다양한 가변강성 구조의 개발 및 소프트 매니퓰레이터와의 결합은 연성 소재의 안전하고, 높은 적응성을 갖는 특징을 가지면서도, 효율적인 힘 전달을 통해, 기존의 딱딱한 매니퓰레이터와 유사하게 다양한 작업을 수행할 수 있을 것이라 기대된다. 또한, 강성이 낮아 제어가 어려운 소프트 매니퓰레이터의 문제 해결을 위해, model-free 제어, 머신러닝 기반의 다양한 제어 기법들에 대한 연구가 활발히 진행되고 있다. 소프트 매니퓰레이터와 결합 가능한 소프트 센서가 발전함에 따라, 양질의 센서 데이터를 얻게 되고, 이를 이용해 AI 기반의 매니퓰레이터 제어 알고리즘은, 추후 소프트 매니퓰레이터가 활용되기 위해 활발히 발전하고 있고, 앞으로 나아가야할 방향일 것이다.  |
- 그리퍼
- 로봇매니퓰레이터
- 다자유도로봇팔
- 전기모터
- 유압




전체댓글 0
(0).jpg)





.jpg)













