


조정산(한국생산기술연구원)
2021-04-16
| 우리는 지진, 기후변화, 전쟁, 건물 붕괴 등 자연적 요인과 인위적인 요인에 따라 점점 규모가 커지고 있는 재해 재난에 직면하고 있다. 최근 유엔(UN)이 발표한 ‘2000~2019년 세계 재해 보고서*’에 따르면, 기후변화가 점차 심각해지면서 지난 20년간 태풍, 홍수 등의 대형 재난 발생건수가 이보다 앞선 20년 기간(1980~1999년)보다 1.7배가량 늘어난 것으로 나타났다. * 최근 20년간 7,348건의 재해로 인해 123만 명이 사망하고 3,400여 조원의 재산 피해 발생 전 세계적으로 재난/재해를 예방하고 대비하기 위한 다양한 연구와 시도도 이루어지고 있지만, 재난 재해를 완전히 막을 수 없기 때문에 재난이 발생한 후 이에 대응하기 위한 매뉴얼 개발과 장비 개발이 다양하게 이루어지고 있다.  대형 붕괴사고와 같은 재난 현장에서 소방관이 수작업으로 대응할 경우, 대형 잔해물을 해체하거나 옮기는 데 많은 시간을 소비하게 되어 신속한 초동대응이 어렵다. 이러한 중량물 작업은 주로 굴착기를 이용하는데, 굴착기의 경우 땅을 파는 것에 최적화되어 재난 환경과 같은 비정형 환경에서 다양한 작업을 수행하기가 어렵고 이동 능력의 제한으로 진입 시간이 오래 걸린다. 무엇보다 운전자의 숙련도에 따라 작업성의 차이가 크고, 운전자의 안전성을 보장하기 어려운 상황에서 실패에 대한 불안감은 작업속도를 더욱 느리게 한다. 이에 재난 현장에서 복잡한 작업이 가능한 재난 대응 장비에 대한 연구가 일본과 미국, 우리나라를 중심으로 이루어지고 있다. 이 글에서는 기술의 발전과 더불어 점점 고도화되고 있는 재난 대응 장비에 대한 동향을 살펴보고자 한다. 재난 대응 장비(Disaster-Responding machine)는 재난 현장에서 붕괴한 콘크리트 잔해나 철골 구조물을 치우는 등 사람이 하기에는 어려운 중량물을 핸들링할 수 있는 기계장치로서 굴착기와 같이 사람이 탑승하고 조종하는 방식의 건설기계를 기반으로 하는 장비(machine)와 원격제어 로봇(robot)을 포함하고 있다. 지진이 많은 일본에서는 여러 가지 재난 대응 장비를 개발하고 있으며, 건설 장비를 만드는 곳이라면 하나 이상 프로토타입을 개발했다고 해도 과언이 아니다. 대표적인 기업으로는 히타치가 있다. 히타치사의 아스타코는 ‘Advance System with Twin Arm for Complex Operation’의 줄임말로 재난 현장뿐만 아니라 건물을 해체하거나 건설 현장에서 어려운 작업을 하기 위해 개발되었다. 기존의 굴착기의 몸체에 두 개의 작업기를 장착한 것으로 ‘두 개의 프론트를 가지는 굴착기’라고도 부른다. 대형 모델(NEO)은 기존 굴착기에 옆부분에 하나의 팔을 추가로 부착한 것으로 건물해체에 주로 활용된다. 재난 대응을 위해 도쿄소방서에 배치된 장비는 7t으로 대칭 구조의 프론트를 가지며, 각각의 프론트는 6개의 관절로 구성되어 있고, 오른쪽 어태치먼트는 절단과 부수기 등이 가능하고 왼쪽에는 그랩이 장착되어 있다. 조작 방법은 기존 굴착기의 조이스틱 방식으로 각 관절을 조작하는데, 운전자의 한팔로 6개의 실린더를 제어하는 방식으로 복잡한 조이스틱 구조를 가진다.  ASTACO-SoRa는 후쿠시마 원전 사고 이후 방사선 노출 등 사람이 접근하기 어려운 재해 환경에서 사용하기 위한 목적으로 무게 2.5t, 궤도 폭 980mm 정도의 컴팩트한 사이즈로 좁은 통로 등에서의 이동성에 중점을 두고 방사선 환경에서 작동을 보장하도록 개발되었다. 디젤 엔진으로 15시간 구동하며, 양팔 로봇은 최대 150kg의 물체를 들어 올릴 수 있고, 여러 개의 어태치먼트를 교환할 수 있게 되어 있다. 원격제어를 위한 스테이션은 조이스틱으로 구성되어 있어 직관적 조종은 어려우며, 동영상에서 보는 바와 같이 작업 속도가 매우 느린 것을 볼 수 있다. 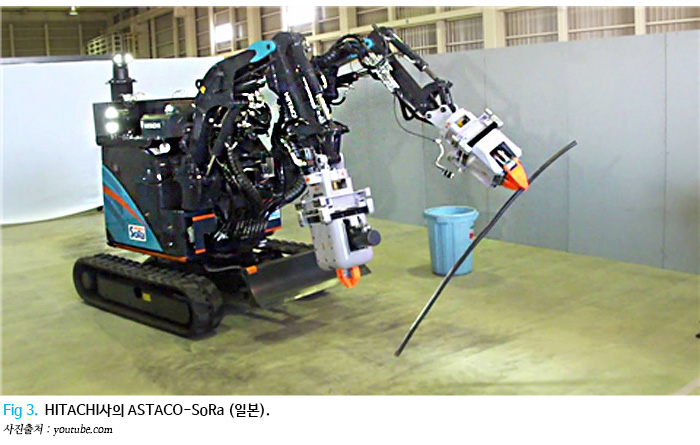 Tmsuk사는 여러 가지 재난 대응 장비를 개발해왔으며, 그중 T-52는 각각 6자 유도로 구성된 양팔과 기능이 다른 1자 유도의 어태치먼트로 구성되어 있으며, 작업자가 직접 탑승하여 조종할 수 있지만, 구조대원이 들어갈 수 없는 곳에 들어가 구조작업을 수행하기 위해 원격 제어도 가능하도록 개발되었다. 무한궤도 형태의 주행 체에 2팔을 가지는 상반신 구조에 유압으로 구동되며, 한쪽 팔에 6자 유도와 그리퍼로 구성되고, 최대 팔 길이 7.23m, 기반 하중은 100kg이다. 예전에는 탑승 상태에서 조종하였으나, 근래에 웨어러블형태의 마스터 장치로 원격에서 제어하고 있다. 로봇 머리에 38만 화소 CCD 카메라 1개, 팔에 25만 화소 CCD 카메라 6개의 영상정보를 이용하여 원격제어가 이루어진다.  TADANO 사의 Robot ops는 두 팔과 네 개의 다리를 가지고 있는 4족 보행 로봇으로 다리를 접은 상태에서 무한궤도를 이용한 이동 가능하며, 총 29개의 자유도(손:6, 팔:6, 어깨:2, 허리:1, 다리:12, 궤도:2)를 가지고 있으며, 한쪽 팔당 기반 중량이 100kg인 유압 구동 방식의 로봇 팔 탑재하고 있다. 3개의 카메라(몸 중심부에 한 개, 양팔에 한 개씩) 영상을 이용하여 조이스틱 방식으로 원격조종이 가능하다. TADANO 사의 창립기념사업의 일환으로 미래형 굴착기의 전시용으로 제작된 것으로 이후 개발사항은 없는 것으로 보인다. 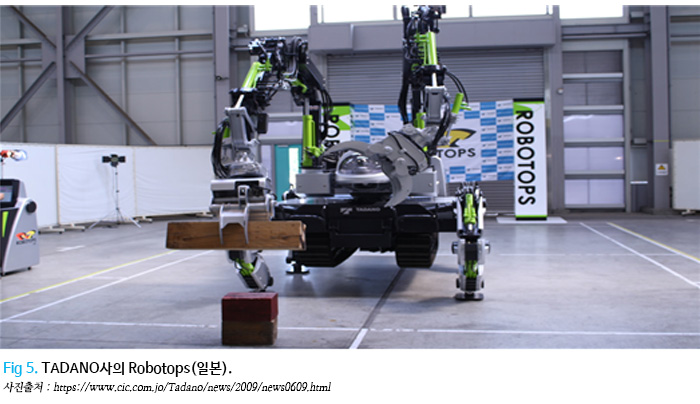 Tmsuk사는 여러 가지 재난 대응 장비를 개발해왔으며, 그중 T-52는 각각 6자 유도로 구성된 양팔과 기능이 다른 1자 유도의 어태치먼트로 구성되어 있으며, 작업자가 직접 탑승하여 조종할 수 있지만, 구조대원이 들어갈 수 없는 곳에 들어가 구조작업을 수행하기 위해 원격 제어도 가능하도록 개발되었다. 무한궤도 형태의 주행 체에 2팔을 가지는 상반신 구조에 유압으로 구동되며, 한쪽 팔에 6자 유도와 그리퍼로 구성되고, 최대 팔 길이 7.23m, 기반 하중은 100kg이다. 예전에는 탑승 상태에서 조종하였으나, 근래에 웨어러블형태의 마스터 장치로 원격에서 제어하고 있다. 로봇 머리에 38만 화소 CCD 카메라 1개, 팔에 25만 화소 CCD 카메라 6개의 영상정보를 이용하여 원격제어가 이루어진다. 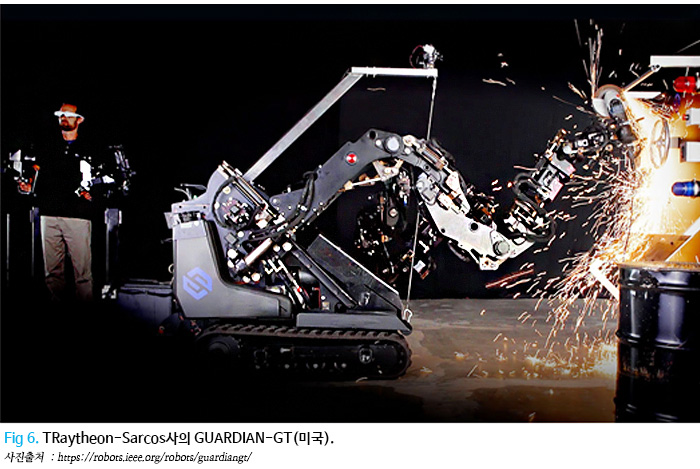 한국원자력연구원의 암스트롱(ARMstrong: Accident Response Manipulator)은 일본 후쿠시마 원전 사고와 같은 원자력 비상상황에서 무인 대응을 하기 위해 2018년부터 개발 중이며, 최종적으로 원자력 사고 발생 시 사람을 대신해서 위험한 일을 해 줄 수 있는 것을 목표로 하고 있다. 유압 시스템을 적용한 암스트롱 로봇은 한 손에 100kg의 물체를 들을 수 있으며, 양팔을 동시에 사용하여 총 200kg의 중량물도 핸들링할 수 있다. 각 팔은 8자 유도를 가지고 있으며, 사람의 팔 구조를 모방하여 다양한 작업이 가능하다. 주행부는 무한궤도를 채택하여 다양한 지면에서 이동이 가능하고 바닥부터 2.2 m에 이르는 영역까지 몸을 굽혔다 펼 수 있어 높은 위치에서의 작업도 가능하다. 최대 이동속도는 6km/h이며 500m 내에서 원격제어가 가능하다.  진우SMC, 한국로봇융합연구원 등이 참여하여 개발하고 있는 특수장갑형 작업 로봇은 대형 건물, 창고, 산업 플랜트 시설 등의 각종 대형 재난 사고 시 유해 가스 누출 상황 또는 추가 구조물 붕괴나 폭발이 예상되어 인력의 투입이 위험한 상황에서 소방· 구조 대원이 탑승하여(또는 원격으로) 신속한 요구조자 구조 작업, 긴급 진압 및 방재 작업을 수행하기 위한 목적으로 개발되고 있다. 유해 가스 누출, 붕괴·폭발 등으로 인한 소방·구조 대원의 인명피해가 우려되는 환경에서 유무인으로 신속 침투 후 긴급 인명구조 또는 진압/방재 작업을 할 수 있도록 내화·방수·방폭·내충격 기능으로 탑승자 안전을 보장할 수 있는 장갑형 로봇 본체와 고하중 장애물 조작·제거, 파괴 소방 작업 등을 위한 유압식 로봇팔 및 작업 도구를 가지고 있다. 본체 크기 5m(L)x2.3m(W)x2.3m(H) 이며, 이동 속도는 최고 40km/h 이상, 경사도 35°(종방향), 10°(횡방향) 이상에서 주행이 가능하다. 유압식 로봇 팔은 파괴력: 5,000kgf 이상, 기반 하중: 500kg 이상, 작업반경 2m 이상이다.  한국생산기술연구원이 한양대학교, 한국전자기술 연구원, 한국기계산업진흥회 등과 함께 로봇기술과 건설기계 기술을 융합하여 재난 현장에서 소방관들의 안전을 보호하면서 어렵고 복잡한 구조 작업을 신속하게 수행할 수 있는 ‘재난 대응 특수목적 기계’를 공동 개발했다.  한국생산기술연구원이 한양대학교, 한국전자기술 연구원, 한국기계산업진흥회 등과 함께 로봇기술과 건설기계 기술을 융합하여 재난 현장에서 소방관들의 안전을 보호하면서 어렵고 복잡한 구조 작업을 신속하게 수행할 수 있는 ‘재난 대응 특수목적 기계’를 공동 개발했다.  장비에 탑승하거나 원격에서 조종이 가능하며, 탑승한 소방관은 웨어러블 장치를 이용해 작업기를 마치 웨어러블로봇 조종 방식은 내 팔처럼 자유롭게 움직일 수 있어 숙련되지 않아도 쉽게 조종할 수 있도록 해주기 때문에 재난 현장과 같은 비정형 환경에서 복잡한 작업을 수행하는 데 적합하다. 재난 대응특수 목적 기계는 운전자의 의도대로 ‘내 팔 움직이듯이’ 조종할 수 있는 웨어러블 조종 장치 ‘kHandler’와 ‘마리오네뜨 알고리즘’을 적용하여 비숙련자도 쉽게 조종이 가능하도록 해준다.  이처럼 우리나라를 비롯하여 전 세계적으로 다양한 재난 대응 장비가 개발되고 있고, 4차 산업혁명 시대 로봇과 AI 기술의 발전에 따라 그 성능의 발전 또한 가속화될 것이다. 하지만, 아직까지 현장에서 복잡한 작업을 수행하여 소방관을 돕기에는 한계가 있다. 그런데도 지속적인 연구가 이루어져야 하는 이유는 한 사람의 생명이라도 구하고자 하는 소방관의 안전을 보호하면서도 붕괴 현장에 갇힌 사람들을 한시라도 빨리 구조하기 위함일 것이다.   |
- 재난대응장비
- 굴착기
- 양팔로봇




전체댓글 0
(0).jpg)





.jpg)













