|
우리가 재난하면 머릿속에 떠올리는 모습은 주로 건물이 붕괴된 모습일 것이다. 영화의 영향도 있겠지만, 화재, 지진, 폭발사고, 부실 공사, 공사현장 등의 재난에서는 붕괴사고 함께 발생하기 때문이다. 아래 Fig 1에서 보는바와 같이 붕괴사고 시 큰 잔해로 인해서 소방관의 진입이 어려워 구조를 지연시킬 수 있다.
이를 위해 사용되는 굴착기는 땅파기에 최적화되어 있어 잔해를 들어 올리거나 치우는 데는 어려움이 있다. 근래에 그랩 등의 특수한 어태치먼트를 장착하여 사용하고 있으나 운전자의 숙련도에 따라 작업속도가 결정된다.

이러한 재난 붕괴현장에서 소방관을 돕기 위해서는 무엇보다 붕괴지역을 이동하면서 중량물을 다루고, 복잡하고도 다양한 작업을 수행할 수 있어야 한다. 세계적으로도 재난대응로봇은 연구단계에 있는 것이 사실이다.
지진의 피해가 매년 발생하는 일본에서도 다양한 로봇이나 장비들이 오래전부터 연구되어왔지만, 여전히 표준화에는 이르지 못했다. 아마도 재난 현장이라는 특수성 때문일 수 있다. 단순하거나 몇 가지 임무를 수행하는 것만으로는 붕괴현장에서 소방관을 지원하기에는 한계가 있으며, 굴착기를 능가하지 못하기 때문일 것이다.
재난대응로봇은 아직 연구단계에 있어 정확한 사양이나 스펙이 정해져 있지 않은 상황이다. 이러한 이유로 본 연구팀에서도 초기 개념설계에 있어 어려움이 있었다. 기존 장비를 벤치마킹하는 ‘FAST FOLLOWER’에 익숙한 장비개발 방법으로는 우리가 목표하는 재난대응로봇을 설계할 수가 없었기에 ‘New Product 개발 프로세스“를 적용하여 로봇을 설계하였다.
우선 재난 현장상황을 분석하여 사용 환경, 임무, 요구 기술 등을 정의하고, 로봇의 형태와 과제 목표를 기준으로 25개의 작업 시나리오를 Fig 2와 같이 개발하였다. 각각의 시나리오에는 상황, 임무, 기술적 이슈, 조종 방법 순으로 정리하였다. 이를 바탕으로 기존 건설 기계와 재난대응 로봇을 조사하여 사양을 도출하고 개념 설계를 진행하였다.1,2,3,4)

재난대응로봇은 우선 붕괴지역을 이동할 수 있어야 한다. 트레일러에서 내려서 재난현장까지 도로를 주행하고, 절개지, 경사면, 단차 등을 극복하고, 양팔작업을 위해 높이 조절도 가능해야 한다. 다음으로 양팔로는 비정형 중량물을 들어서 옮기거나 밀어서 치울 수 있어야 하고, 콘크리트 잔해에 얽혀 있는 철근이나 철골 구조물을 자를 수 있어야 하며, 대형 문을 열거나 샌드위치 패널을 벌릴 수 있어야 한다. Fig 3에서는 재난대응 시나리오를 이미지화한 것을 예시로 보여준다.

표1 은 개발된 재난대응 시나리오에 대해 간략하게 작성한 것이다. 우선 이동차량에서부터 사고현장까지의 이동에 대한 시나리오를 평지이동, 종경사, 불규칙노면, 단차, 모서리길, 작업지점에서의 자세제어로 6개의 씬으로 나누었다.
다음으로 대응 작업은 절단, 인양, 벌리기, 옮기기, 부수기의 5개 시나리오로 나누고 각각에 대한 씬을 정의하였다. 절단은 가위형태의 절단기, 회전톱 형태의 어태치먼트를 이용한 절단과 양팔을 조작하여 한 팔은 해당물체를 파지하고 한팔로 자르는 절단으로 정의하였다.
인양에 대해서는 고리를 이용하는 방법과 그리퍼를 이용하는 방법, 그리고 양팔을 이용하는 방법으로 최대한 팔을 뻗은 상태와 최대의 힘을 낼 수 있는 자세에서의 인양 작업으로 분류하였다. 다음으로 벌리기는 어태치먼트의 벌리기 기능을 이용하는 씬과 양팔을 이용하여 대형 미닫이 문이나 샌드위치 패널을 벌리는 작업으로 정의하였다. 물체를 옮기는 작업의 경우는 밀어서 옮기는 것과 들어서 옮기는 작업으로 나누고 각각 바닥에 놓여진 콘크리트 1ton 잔해를 밀어서 옮기기, 바닥에 있는 승용차(1.5ton)를 밀어서 치우기, 양팔로 드럼통 집어서 쌓기, 양팔로 긴 물체(파이프, H빔 등)를 옮기기, 양팔로 자동차 들어서 치우기로 정의하였으며, 부수기 작업은 팔을 휘둘러서 벽 등을 부수거나 시멘트벽돌/블록 벽을 쳐서 넘어뜨리는 씬과 샌드위치 패널, 목재로 이루어진 벽체를 그리퍼로 찔러서 휘졌듯이 부수는 씬으로 정의하였다. 표2에서 위와 같은 대응 시나리오에 따른 로봇의 사양을 도출한 것을 나타났다.



재난현장에서 다양한 작업을 수행하기 위한 양팔 작업기는 개발된 시나리오를 만족할 수 있도록 설계 사양을 도출하여 설계하였다. 특히 소방관도 쉽게 조작할 수 있도록 운전자의 의도대로 잘 움직이기 위한 마리오네트 조종방식을 고려하여 형상을 설계하였다.
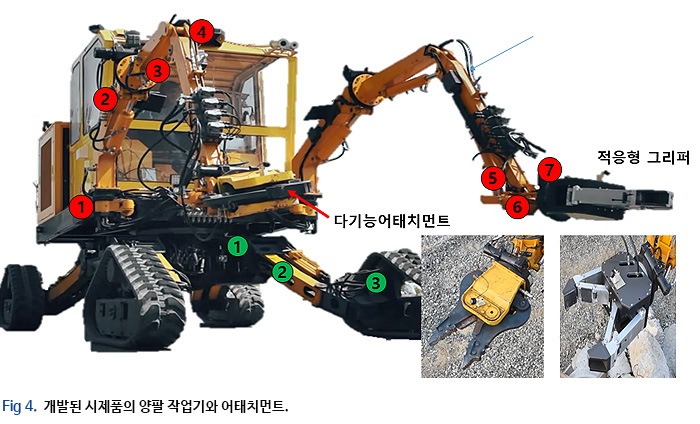
Fig 4와 같이 양팔 작업기의 관절에는 굴착기에 사용되는 유압 실린더인 복동 피스톤형을 주로 사용함에 따라 관절의 작동 각도에 따른 관절 구조 설계가 필요하며, 인장력과 압축력의 차이로 인한 중력방향을 고려하여 액추에이터를 배치하였다.
3번과 7번 관절은 Roll방향 회전으로 좌우 토크를 동일하게 가져가기 위하여 웜기어와 유압모터로 관절을 구성하였다. 2번, 4번, 5번은 중력방향에 해당되는 Pitch회전을 담당하는 관절로 액추에이터 배치도 이에 맞게 이루어졌으며, 2번 관절은 중량물을 인양하기 유리하도록 관절 및 링크를 설계하였다. 손목 관절에 해당하는 5번 관절은 땅을 파는데 큰 힘을 내는 굴착기와 반대로 들어올리는(lift) 작업에 더 큰 힘을 낼 수 있도록 실린더를 배치하고, 넓은 작업 범위를 가지도록 6-bar 관절 구조를 적용하여 ±70°를 가지도록 설계하였다.
6번 관절은 Yaw축으로 양쪽에 실린더를 배치하여 관절을 구동하여 동일한 힘을 가지도록 설계하였다. 양팔 협조 작업을 위해서 두 팔이 겹치는 영역이 존재하도록 설계하였다.2)

재난대응 로봇은 구조화되지 않은 환경에서 절단, 파쇄, 피킹 및 이동과 같은 다양한 작업을 수행해야 한다. 그러나 기존 중장비들처럼 작업에 따라 어태치먼트를 교체하는 방식으로는 재난현장에서 활용하기 어렵고 다양한 작업을 신속하게 수행하기 어렵다.
이에 우리는 TRIZ 분리 원리를 사용하여 이러한 물리적 및 기능적 모순 관계를 해결하는 방법을 제안하였다3). 오른손, 왼손 및 양손 작업을 정의하고 어태치먼트를 기능적으로 분리하였다. 이를 위해 기존 장비와 필요한 작업 시나리오를 조사하고 분석하여 두 개의 어태치먼트를 각각 설계하였다. 정밀한 조작과 다양한 조작을 위한 다기능 어태치먼트 A는 자르기, 집기(핀칭), 벌리기, 부수기 기능을 모두 가지고 있다. 이는 어태치먼트를 교환하지 않고 다양한 작업을 수행하기 위함이다. 어태치먼트 B는 왼쪽에 장착되는 그리퍼 타입으로 불규칙한 형상을 가지는 다양한 물체를 잡을 수 있도록 적응형 핑거메커니즘을 적용하였으며, 핀칭, 그라스핑 모두 가능하다.
드럼통과 같은 큰 물체는 마치 사람이 양팔을 이용하여 부피가 큰 물체를 끌어안듯이 양팔을 큰 그리퍼로 활용할 수 있도록 어태치먼트A와 B의 가장자리 부분을 설계하였으며, 양팔 협조 작업 시 힘을 적절히 유지할 수 있도록 알고리즘을 개발하였다.

재난대응 특수목적기계는 양팔 작업기, 어태치먼트, 스윙조인트 및 하부체 다리와 구동크롤러로 구성되며, 29개 유압실린더와 유압모터로 이루어져 있다. 복잡한 작업을 수행하기 위해서는 조종 시스템의 명령에 따라 모든 관절이 중앙제어기의 명령에 따라 움직일 필요가 있다. 이러한 이유로 밸브회로 및 파워팩을 포함하는 유압 시스템을 운용방법에 적합하게 설계해야 하며 설계한 유압시스템은 Fig 5와 같다.
특수목적기계의 양팔 작업기는 작업에 따라 필요한 힘을 일정하게 유지할 수 있어야하기 때문에 압력보상제어방식 펌프시스템을 구성하였다. 또한, 제어 명령에 따라 다수의 액추에이터를 위치제어 기반으로 제어하고, 실린더 유량을 엔진 속도에 비례하여 제한함으로서 엔진 부하 변동 최소화하는 방식으로 엔진-펌프 파워매칭을 적용하였다. 이는 한정된 파워로 상부체와 하부체의 성격이 다른 동작을 지원하기 위해 고안한 방식이다. 유압파워팩은 5톤급을 기준으로 사양을 정하였으며, 엔진은 터보디젤 엔진으로 55kW(75HP)의 출력을 갖는 두산 D24엔진으로 선정하였다.
펌프는 2개의 피스톤펌프가 연결되어 있고, 펌프1은 양팔 작업기와 주행 모터구동, 펌프2는 주행 시스템의 다리구동으로 분리하였고, 각 펌프에서 목Table하는 압력과 유량을 공급하는 형태로 이루어져 있다. 펌프는 DANFOSS사의 SERIES 45 Axial Piston Pump 중 Remote Pressure compensated type으로 펌프1은 최대압력 250bar, 최대 유량 71cc/rev이고, 펌프2는 최대압력 250bar, 최대 유량 25cc/rev이다.
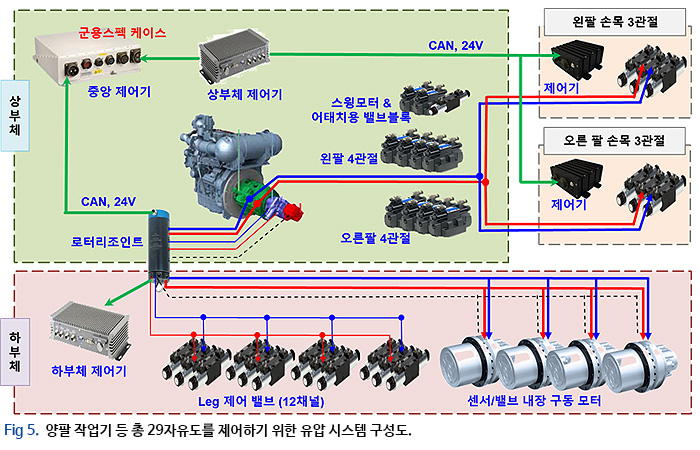
양팔작업기의 밸브 시스템은 제어 응답성을 고려하여 밸브 및 매니폴드 블록 위치 선정은 다음과 같이 하였다. 비교적 사이즈가 큰 양팔 작업기 1번에서 4번 관절의 실린더 및 스윙조인트의 유압모터의 유량을 제어하기 위해 사용된 DANFOSS사의 PVG32 밸브 9열을 몸체 프레임 선단부에 장착하였고, 또한 다자유도의 조인트 구동 중 간섭 및 압력손실 최소화를 고려하여 유압배관을 설치하였다.
특히 손목관절의 위치제어 응답성에 따라 작업성능이 결정되므로, 손목관절 3자유도는 MOOG사의 G761 서보 밸브를 사용하였으며, 어태치먼트의 압력을 제어하기 위해서 같은 서보밸브를 사용하였다. 또한 배관 라인에 따른 응답속도 손실을 줄이기 위하여 손목관절의 실린더를 제어하는 밸브는 최대한 실린더 가까이 위치하는 것이 필요하다.
또한 7자유도로 구성된 양팔 작업기의 특성상 몸체에 밸브 블록이 있는 기존 굴착기와 같은 구조로 유압시스템을 구성할 경우, 많은 배관이 관절을 지나가야 되는 문제가 발생한다. 이 두 가지 문제를 해결하기 위해 손목 관절을 제어하는 밸브 블록을 아암 부분에 위치하여 P라인과 T라인만 연결하여 배관을 줄이고, 실린더 제어응답성을 높였다.4)

재난 현장과 같이 정형화되지 않은 환경에서 사람에 비해 사이즈가 큰 특수목적기계를 이용하여 다양한 작업을 수행하기 위해서는 운전자의 의도대로 양팔 작업기를 조종할 수 있어야 한다. 이러한 이유로 운전자의 움직임을 방해하지 않고, 작업의 효율을 높이며, 운전자의 의도를 인식할 수 있는 조종기 개발이 필요하다.
운전자의 의도를 파악하기 위해 우리는 팔 길이 6m 크기의 작업기를 직관적으로 원격조작하기 위한 마스터 장치는 운전자의 동작범위를 충분히 사용할 수 있는 인체공학적 형태의 웨어러블 조종기로써, R-P-P-P-Y-R로 6자유도 관절을 구성하였다. 또한 웨어러블 형태의 조종기는 중력보상을 위해 관절 액추에이터의 필요 토크가 증가하며 액추에이터 무게 또한 무거워진다. 이는 곧 운전자로 하여금 조종기를 조작함에 있어 불편함을 야기하며 시스템이 크고 비싸지는 문제가 발생한다. 본 연구에서는 이를 해결하고자 와이어를 이용한 중력 보상 장치를 기저부에 추가하여 관절 액추에이터 및 전체 시스템의 중량을 줄이도록 Fig 6과 같이 설계 및 제작하였다.

제작된 웨어러블 조종기는 운전자의 동작범위를 충분히 사용할 수 있으며, 움직임을 제한하지 않는 의인화(anthropomorphic) 형태의 웨어러블 조종기로써, 경량 구조를 위한 직렬 메커니즘으로 R-P-P-P-Y-R로 6자유도 관절로 구성하였다. 각 관절은 각도를 측정하기 위한 포텐셔미터와 현장감을 위한 힘 반향(active)을 위해 모터와 감속기로 이루어져 있다. 또한 장시간 조작 시에도 운전자의 피로를 저감할 수 있는 와이어기반의 능동형 중력 보상 장치가 있다.5)

개발된 장비를 실험하기 위한 시나리오는 소방관이 현장으로 접근하기 위한 진입로 확보를 위해 대형 잔해를 인양, 시멘트 잔해 파쇄, 철근 절단 하는 작업을 수행하는 것과 매몰자 위에 쌓여 있는 잔해를 안전하게 치워 인명 구조 지원하는 것과 갇혀 있는 사람들의 출구 확보를 위해 문이나 벽과 같은 구조물을 벌리는 작업, 잔해를 밀어내는 작업으로 설정하였다.
특히 양팔 작업에 대한 개념을 수립하고 이를 검증하기 위한 양팔을 협조하여 철근을 절단하고, 한 팔로 구조물을 잡고
다른 한 팔로 자르고 옮기거나, 한쪽에 물통을 잡고 다른 쪽으로 옮겨 담는 작업, 긴 파이프와 드럼통을 들어 올리는 등 구체적인 시나리오를 제안하였으며, 이를 검증하기 위해 구축된 한국로봇융합연구원의 재난안전센터 실증환경에서 Fig 7과 같이 실험을 수행하였다. 6)

우리는 소방관이 쉽게 조작할 수 있어야 된다는 큰 목표를 가지고 새로운 로봇을 설계하였다. 시제품을 제작하고 다양한
실험을 수행하면서 유압 로봇이 해결해야 될 문제들, 제어에서 풀어야 할 문제들을 정리할 수 있었다. 특히 기존의 유압 액추에이터로 구성된 관절로는 양팔 작업 등 복잡한 환경에서 다양한 작업을 수행하는데 어려움이 있었다.
이에 우리는 사람 손목과 같은 관절 작동 범위를 가지는 손목을 설계하고 제작하여 실험 중에 있다. 이는 오랜 역사를 가진 유압과 건설 기계 기술에 로봇 기술이 접목되면 새로운 능력을 보여줄 수 있음을 나타낸다.
이처럼 우리는 실제 재난 현장에 투입하기 위하여, 재난 상황이라는 특수한 환경에서 민첩하고 정교한 동작들을 수행하기 위해서는 기존 관절 구조를 벗어나 생체 모방적 관절과 액추에이터 설계와 함께 정밀한 힘 제어를 위한 유압 시스템 및 제어 기술을 고도화해 나갈 계획이다. 시제품을 통해서 현장의 소방관들과 함께 재난대응 로봇에 대해 이야기할 수 있기를 바래본다.


|







(0).jpg)





.jpg)













