4차 산업혁명이 도래하며 기계 및 로봇 기술은 우리에게 더 익숙한 단어가 되었고, 일상 생활과 밀접하게 우리에게 영향을 미치고 있다. 자연스럽게 공학 기술은 인류가 발전하고 인간의 일상생활에 도움을 주기 위한 방향으로 발전해왔고, 그 중에서도 특히 기계 로봇 기술은 인간과 상호작용하며 가장 직접적인 도움을 주는 기술로서 우리에게 친근하게 존재해왔다. 대표적으로, 라운지랩의 바리스타 로봇은 우리 생활에서 로봇 기술로 도움을 주고 있는 가장 최신의 예시이다. (Fig.1)

이러한 일상 생활에 도움을 주는 다양한 로봇 기술 중에서도, 물체 파지가 가능한 로봇 그리퍼는 인간과 실생활에서 상호작용하는 로봇 매니퓰레이션 분야에서 특정한 작업 수행을 위해 매우 핵심적인 기술이다. 사람 손과 같이 다양한 물체를 파지하기 위한 다자유도 그리퍼는 로봇공학 기술이 실제 인간생활에 적용되기 위해 가장 필수적인 분야라고 할 수 있다.

기존의 딱딱한(rigid) 소재의 재료로 이루어진 그리퍼는 일반적으로 다관절 링크 구조와 모터에 의해 파지 움직임이 구현되어왔다. 성공적인 파지를 위한 복잡한 모터 제어 알고리즘이 필요했기 때문에, 그리퍼 제어를 위한 메인프로세서 상의 연산 복잡도를 높이는 문제가 있었고, 딱딱한 링크 구조로 이루어졌기 때문에, 오작동시 사람과 부딪혔을 때 사고의 위험도 있었다. 또한, 딱딱한 그리퍼의 파지 움직임시, 소재에서 비롯한 높은 강성으로 인해 그리퍼의 파지 물체에 대한 적응성이 낮아, 파지 물체의 복잡한 형상에 따라 그리퍼의 기계적인 구조 혹은 제어 방식이 변경되어야 하는 경우가 있어 다양한 로봇 매니퓰레이션 분야에 자유롭게 활용되기 어려움이 있었다.
이러한 문제를 해결하기 위해, 로봇 공학 분야에서는 기계적으로 높은 적응성있는(compliant) 메커니즘에 대한 연구가 화두가 되었고, 로봇 소재 자체를 높은 적응성있는(compliant) 부드러운 소재를 이용하는 소프트 로봇 연구가 많은 연구자들에 의해 연구되어 왔다. 그중에서도, 소프트 그리퍼는 기존의 강성구조 그리퍼로는 쉽고 성공적인 파지가 어려웠던 문제를 해결해 큰 주목을 받았다 (Table. 1).

특히, 소프트 그리퍼는 파지 움직임을 위한 복잡한 링크 구조와 성공적인 파지를 위한 복잡한 모터 제어 알고리즘 없이 부드러운 소재 자체가 외부 환경에 순응해 변화하는 특성인 morphological computation을 통해, 프로세서상의 복잡한 연산없이 다양한 물체에 적응해 파지 가능하다. 또한, 로봇 제작의 재료가 실리콘으로 이루어졌기 때문에, 가격이 비교적 저렴하고, 가벼워 시스템 오작동 시 인간에게 비교적 덜 위험하다는 장점도 가진다.
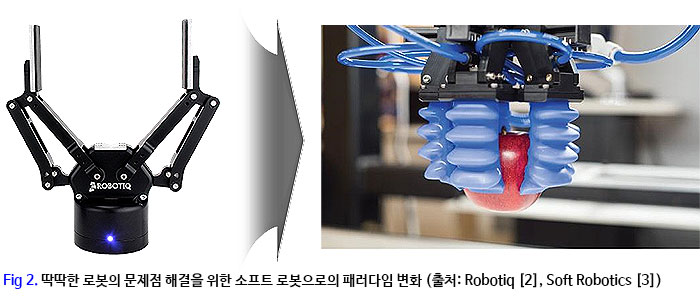
결과적으로, 소프트 로봇 연구는 기존 로봇 기술이 해결하기 어려웠던 문제를 쉽게 해결 가능하다는 관점에서 큰 주목을 받았다. 따라서, 부드러운 소재 자체의 높은 적응성을 활용한 그리퍼 분야에서 소프트 로봇은 높은 활용도를 가져 다양한 방식의 소프트 그리퍼가 연구되어왔다. (Fig. 2)

소프트 그리퍼는 파지 움직임을 위한 소프트 구동기의 구동 방식에 따라, 1) 케이블 구동(cable-driven) 방식, 2) 공압 구동(pneumatic) 방식, 3) 형상 기억 합금(shape memory alloy) 구동 방식, 4) 전기 화학 구동 방식 등으로 분류될 수 있다.
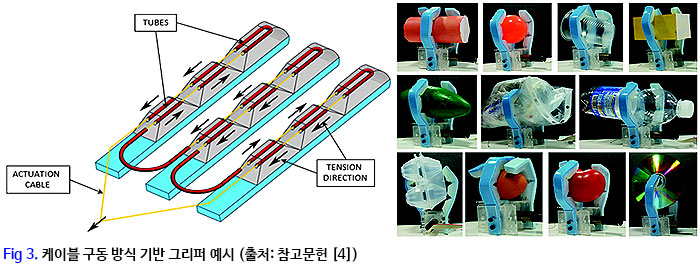
케이블 구동에 의한 방식은 부드러운 소재 내부에 위치한 케이블 라우팅에 케이블을 삽입하고,전기 모터에 의해 케이블의 장력을 이용해 파지 움직임을 구현한다. 모터와 케이블을 이용해 파지력을 구현하므로, 비교적 높은 힘 구현이 가능하다는 장점이 있지만, 과도한 케이블 장력에 의해 케이블 라우터가 삽입된 실리콘 구조가 손상되거나, 와이어의 마찰, 미끄러짐 등에 의한 제어 어려움을 갖고 있다.
공압 구동 방식은 일반적인 소프트 로봇의 구동 방식으로, 실리콘, 천(fabric) 등의 부드러운 소재를 이용해 챔버를 구성하고, 공기 압력에 의해 원하는 움직임을 구현한다. 하지만, 공압 구동을 위한 펌프, 레귤레이터 등 부가적인 공압 구동 부품이 필요해, 전체 시스템 구성이 거대해지는 단점이 있다.
형상 기억 합금 기반 구동방식의 경우, 형상기억 합금 와이어를 실리콘 구조 내부에 삽입하고, 줄 히팅 (joule heating)을 통해 굽힘 움직임을 구현한다. 하지만, 쿨링(cooling) 과정이 느리고, 형상 기억 합금 구조의 낮은 굽힘 힘이 구현되는 단점을 갖고 있다.
마지막으로, 전기 화학 구동 방식은 소재의 전기 화학적 특성을 이용해, 전압에 의해 움직임이 구현되는 전기 반응형 폴리머(electroactive polymer)로 개발되어왔다. 하지만, 일반적으로 전기 반응형 폴리머 구동을 위해 높은 전압이 필요하고, 굽힘 힘이 낮은 문제가 있었다. 각 구동방식에 따라 최신 소프트 그리퍼 연구 동향에 대해 상세히 살펴보자면 아래와 같다.

케이블 구동 방식 기반 소프트 그리퍼는 일반적으로 부드러운 소재 내부에 와이어가 라우팅(routing)되고, 전기 모터를 이용해 굽힘 움직임을 구현한다. 이탈리아 Sant'Anna School of Advanced Studies의 연구진은 케이블과 튜브를 이용한 라우터를 이용해 단일 모터를 이용해 다양한 물체 파지가 가능한 소프트 그리퍼를 개발했다 (Fig.3). 각 손가락 별로 패시브 관절을 포함하고 있어, 파지 물체의 형상에 맞추어 적응하며 파지 가능한 그리퍼 디자인이라는 특징을 갖고 있다.
하지만, 케이블 구동 기반 그리퍼의 디자인 이외에도, 케이블-모터 구동시 발생하는 문제를 해결하기 위한 연구도 핵심 기술 중 하나이다. 예시로, 케이블과 라우터, 연결된 모터와의 텐션(tension)을 유지하지 못해 발생하는 제어가 어려운 단점이 있어, 구조적으로 케이블 슬랙(slack)을 유도하는 메커니즘 등 케이블 구동 기반 구동기의 제어를 위한 연구 등이 진행되고 있다. 또한, 케이블 구동 기반 소프트 구동기의 실리콘이 파손되는 내구성 문제 해결을 위해, 케이블 기반 구동기의 내구도, 신뢰성 평가를 위한 연구가 수행되고 있다.

공압 기반의 소프트 구동기는 부드러운 소재의 높은 적응성을 극대화 시킬 수있고, 다양한 움직임 표현이 가능해 일반적인 소프트 그리퍼의 구동기로 개발되어져 왔다. 공압 기반 소프트 그리퍼의 경우, 음압 재밍 기반 그리퍼, 손가락형 그리퍼 등으로 분류될 수 있다. (Fig. 4)
음압 재밍(jamming) 기반 그리퍼는 일반적으로 부드러운 챔버 내부에 재밍 물질을 삽입하고, 음압에 의해 변화하는 강성을 이용해 물체를 파지한다. 별도의 제어 알고리즘 없이 챔버의 높은 적응성을 이용해 다양한 형태의 물체 파지가 가능하다는 점에서 많은 주목을 받고 있다 [5]. 하지만, 재밍 기반 그리퍼의 경우, 재밍 챔버 형상에 물체가 맞닿을 수 없는 평평한 면을 포함하는 물체는 파지하기 어려운 점이 있다. 하지만, 재밍 기반의 강성변화 구조는 소프트 구동기의 낮은 강성을 보완하는 구조로서, 다양한 소프트 그리퍼와 결합하는 연구가 수행되고 있다.

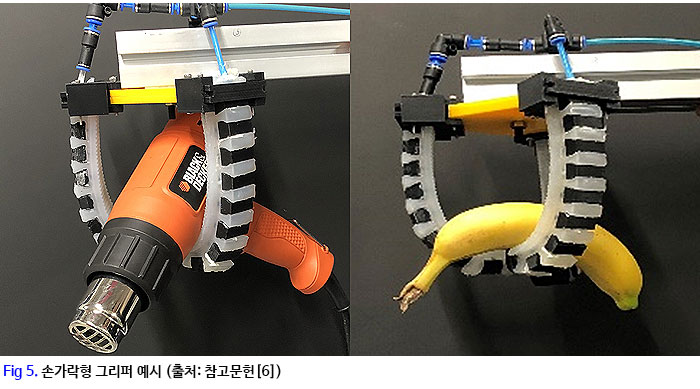
또한, 사람 손가락과 같이 굽힘 움직임 구현이 가능한 소프트 구동기를 이용해 손가락형 그리퍼로 적용될 수 있다. 손가락형 소프트 그리퍼의 경우, 기존의 딱딱한 그리퍼와 달리 복잡한 제어 알고리즘 없이 다양한 물체 파지가 가능하다. 하지만 소프트 공압 구동기 기반 그리퍼는 구현 가능한 힘이 케이블 기반 구동기에 비해 낮아 딱딱한 소재, 천, 와이어 등과 결합해 기존의 낮은 힘을 개선하기 위한 연구가 수행되어왔다 (Fig. 5).
또한, 공기 주입만으로 다양한 형상의 물체를 쉽게 파지 가능하다는 점에서 산업 현장에서 높은 활용도를 가지고 있다. 실제로, Soft Robotics 社에서 개발한 소프트 그리퍼는 다양한 산업 현장에서 활용되고 있어, 로봇 기반 생산설비 분야에서 기존의 그리퍼로 해결이 어려웠던 문제를 해결하는 큰 기여를 하고 있다.
이외에도, 팽창 가능한(inflatable) 소프트 구동기를 이용해 물체를 감싸 쥐는 케이징(caging) 파지가 가능한 오리가미 패턴을 이용한 소프트 그리퍼 등 기존의 로봇 그리퍼와는 다른 새로운 형태의 그리퍼가 개발되어오고 있다. 또한, 심해와 같은 극한 환경 속에서 다양한 비정형 해양 생물을 채집하기 위한 기술로, 오리가미 패턴을 활용한 소프트 그리퍼도 활용되고 있어, 다양한 비정형 환경에서의 소프트 그리퍼의 활용도는 높은 전망을 가진다 (Fig. 6).
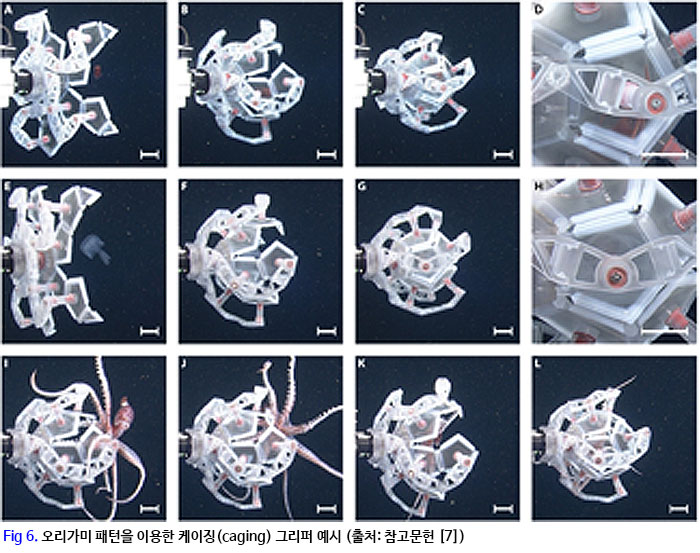
부드러운 소재의 높은 적응성을 이용해 사람과 안전하게 상호작용하며 다양한 물체 파지가 가능하다는 장점으로 향후 실용화될 그리퍼 기술로 높은 가치를 지닌다.

형상 기억 합금과 같이 소재의 재료적인 물성을 이용한 소프트 구동기도 활발히 개발되어왔다. 서울대 안성훈 교수님 연구팀은 니켈-크롬(Nichrome, Ni-Cr) 기반 형상 기억 합금을 부드러운 소재 내부에 삽입하여 비대칭적인 움직임을 구현하고, 굽힘, 비틀림 등 다양한 움직임 구현 가능한 소프트 구동기를 개발해 그리퍼로 활용한 연구를 수행했다 (Fig. 7).
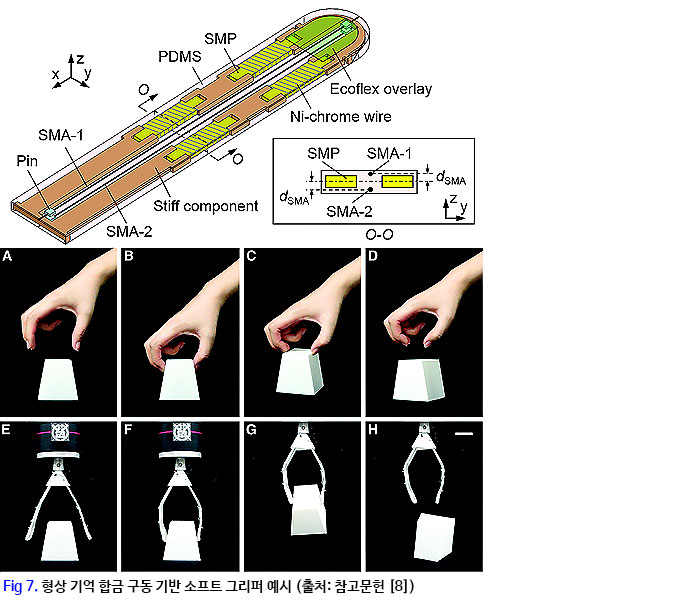
하지만, 줄히팅(joule heating)에 의존한 구동방식으로 인해 낮은 구동속도라는 한계가 있고, 높은 hysteresis를 가져 일반적인 그리퍼로써 활용이 어려운 단점이 있다.

전기 화학 구동방식 그리퍼는 소재 관점에서, 고전압에 의해 변화하는 유전성 탄성체(dielectric elastomers)를 활용해 압착되는 성질을 이용해, 굽힘, 선형 등 다양한 움직임을 구현하고, 이를 그리퍼로 적용하는 연구가 수행되고 있다. 일반적인 유전체의 경우, 원하는 움직임 구현을 위해 고전압의 전기 에너지가 필요하기 때문에, 효율적인 구동을 위한 구동기 개발에 대한 연구가 주로 수행되고 있다. 또한, 유전성 탄성체의 전기화학적 성질을 이용해 굽힘 뿐만 아니라, electroadhesion 가능한 구동기를 개발해, 그리퍼로 활용하는 연구가 수행되고 있다 (Fig. 8).
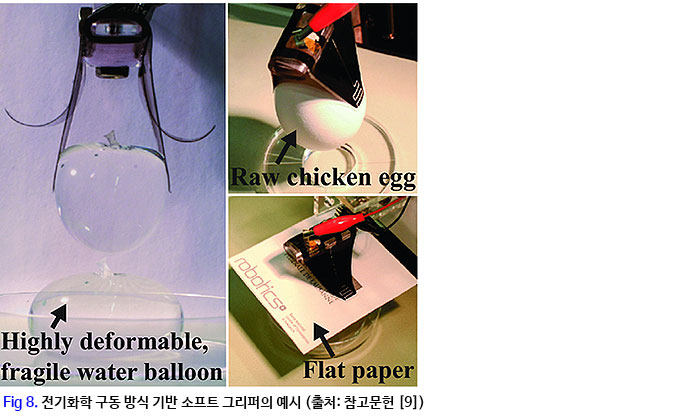
전기화학 구동방식 그리퍼의 경우, 부드러운 소재의 특성상, 파지력이 낮은 단점이 있어, electroadhesion 방식과 결합해 파지 성능을 높이는 연구가 기대되는 분야이다. 이 밖에도, 근본적으로 전기 화학 방식 구동기 자체의 성능을 해결하기 위한 다양한 재료공학 관점의 구동기 연구도 활발하게 이루어질 전망이다.

소프트 그리퍼 디자인 자체를 개발 하는 연구를 넘어서, 다양한 센서와 결합하거나, 가변강성 구조를 결합해 소프트 그리퍼의 성공적인 파지를 위한 센싱 기능, 파지 성능 등의 연구가 이루어져오고 있다.

소프트 그리퍼의 기능성 향상과 성공적인 파지 제어를 위해 다양한 센서를 내장하려는 연구도 활발하게 진행되고 있다. 소프트 그리퍼는 부드러운 소재로 이루어져 기존의 딱딱한 센서와는 결합이 어렵고, 복잡한 움직임 측정이 어려운 단점이 있어, 주로 카메라 시스템과 통합한 그리퍼가 개발되어 왔다.
하지만, 부드러운 소재를 이용한 소프트 센서 분야가 동시에 발전해오면서, 소프트 그리퍼와 융합될 수 있는 다양한 소프트 센서가 개발되어왔다. 크게, 소프트 센서가 내장된 소프트 그리퍼 제어를 위한 알고리즘 개발도 모델링 기반, 학습 기반의 방법으로 수행되어왔다 (Fig. 9).
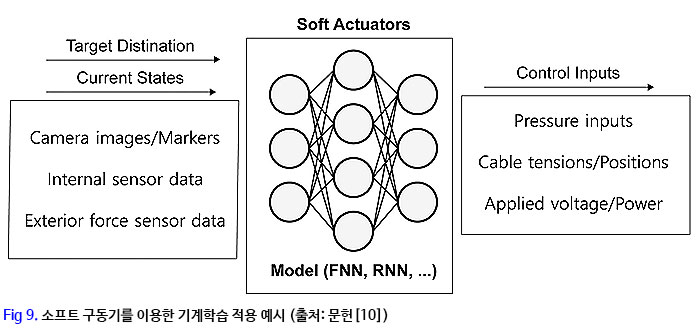
모델링 기반의 소프트 그리퍼의 파지 성능 측정을 위한 렌치(wrench) 모델링 기반 force equilibrium을 이용한 파지 성능 지표가 개발되기도 하였다. 하지만, 소프트 그리퍼의 비선형적인 거동을 정확하게 모델링 하기란 매우 어렵기 때문에, 카메라 센서와 기계학습 알고리즘을 기반한 파지성능 관련 연구가 수행되어져 오고 있다. 최근 들어, 복잡한 움직임 측정이 가능한 다양한 소프트 센서가 개발에 따라, 소프트 센서 신호와 recurrent neural network (RNN)을 적용해 학습시켜 소프트 구동기의 접촉 힘, 굽힘 등이 측정이 가능한 알고리즘이 개발되기도 하였다.
기계학습 구조에서 양질의 학습 데이터 수집을 위해서는 소프트 센서의 신뢰성 있는 센서 수집이 이루어져야 하기 때문에, 소프트 센서의 내구성, 센싱 메커니즘 등에 대한 연구도 함께 이루어져야 한다. 따라서, 양질의 데이터 수집이 가능한 소프트 센서와 소프트 그리퍼가 결합된 그리퍼를 이용해 파지 성공을 위한 기계학습 알고리즘에 대한 연구는 추후 기대가 되는 부분이다.

부드러운 소재로만 이루어진 소프트 그리퍼는 낮은 강성을 갖기 때문에, 가변강성 구조를 결합해 부족한 페이로드(payload)를 높이는 연구도 수행되어왔다. 가변강성 구조와 결합함으로써 부가적인 구동 소스가 추가되어 시스템 복잡도가 높아지는 단점이 있어, 최대한 간단한 구동 소스를 이용해 가변강성 구조를 형성하기 위한 재밍(jamming), 셀프락킹(self-locking) 등의 메커니즘이 연구되고 있다.

이 밖에도, 게코 도마뱀 발바닥 표면을 모사한 미세 접착 구조를 활용해 물체 파지에 유리한 높은 접착성을 갖도록 하는 연구도 이루어져왔다. 하지만, 미세접착구조를 이용한 소프트 그리퍼의 경우, 접착 구조의 접착 성능을 능동적으로 제어하기 어려운 단점이 있어, 접착 성능 제어가 가능한 미세접착구조를 개발하는 것이 주요 관심사이다. 미국 Stanford 대학교의 연구팀은 게코 도마뱀을 모사한 마이크로 구조 기반 접착 패드를 이용해 높은 무게를 들어올릴 수 있는 그리퍼를 개발하고, 우주환경에서도 활용 가능한 접착패드 기반 그리퍼를 개발하여 소프트 로봇의 적용 범위를 넓힌 바 있다 (Fig. 10).

소프트 로봇의 발전은 기존의 딱딱한 로봇이 해결하지 못한 다양한 문제점을 해결 가능하다는 점에서 미래 로봇 기술로 높은 가능성을 가진다. 특히, 부드러운 소재로 이루어진 소프트 그리퍼는 기존의 딱딱한 소재로 이루어진 그리퍼와 비교해, 높은 적응성, 비교적 쉬운 제어방법 등의 장점을 이용해 활발히 연구되고 있는 분야이다.
하지만, 때로는 부드러운 소재 자체의 높은 적응성이 오히려 파지 제어를 더 어렵게 하거나, 낮은 강성으로 인해 낮은 payload 등의 문제가 되기도 한다. 따라서, 다양한 강성소재와 결합한 하이브리드 로봇에 대한 연구로 소프트 로봇과 딱딱한 로봇의 장점을 모두 살릴 수 있는 로봇 기술 개발이 필요할 것이다. 이 밖에도, 소프트 로봇의 낮은 강성을 해결할 수 있는 다양한 가변강성 구조가 개발되고 있는데, 이러한 가변강성 구조를 결합해 부드러운 소재의 장점과, 딱딱한 소재의 장점을 동시에 가질 수 있는 다양한 그리퍼가 개발이 기대된다.
또한, 복잡한 비선형 움직임 측정이 가능한 소프트 센서가 개발되고, 신뢰도 있는 양질의 신호수집이 가능한 소프트 센서 연구와 동시에, 소프트 센서와 결합된 소프트 그리퍼를 이용한 센서 내장형 그리퍼에 대한 추가적인 개발이 이루어질 수 있다. 특히, 기계학습 알고리즘을 적용한 성공적인 파지를 위한 알고리즘 개발도 추후 소프트 그리퍼 연구 분야가 나아가야할 방향일 것이다.

|








(0).jpg)





.jpg)













