|
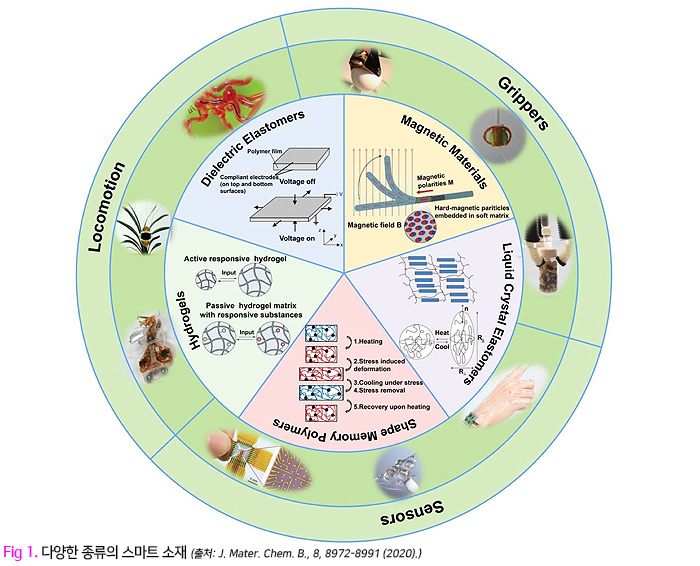
소프트 로봇 구동 방식 중 공압 시스템을 제외화면 많이 사용되는 것은 스마트 소재를 기반으로 하는 방식이다. 스마트 소재란 빛, 온도, pH, 전, 자기장 등 외부 환경 자극에 반응해 스스로 형상 변형 및 움직임을 구현할 수 있는 소재를 의미한다. 이런 스마트 소재들은 소재 자체가 기계의 특성을 구현 할 수 있다는 점에서 의의를 가지며, 유연 전자 소자 및 소프트 로봇 등 다양한 분야의 가능성을 넓히기 위해 연구되고 있다.
.jpg)
전기 활성 고분자(Electroactive polymer)는 전기 자극을 받아 동작하는 스마트 소재이다. 전기 활성 고분자는 구동 원리에 따라 전기형(electronic EAP) 과 이온형(ionic EAP)으로 분류할 수 있다.
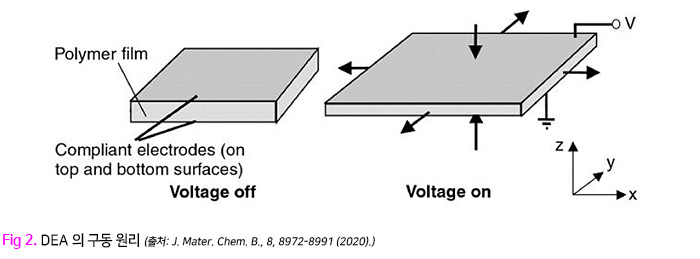
전기형 전기 활성 고분자의 대표적인 예시는 유전 탄성체(Dielectric elastomer actuators, DEAs)이다. 유전 탄성체의 구조는 유전 탄성체의 구동 원리와 밀접한 관련이 있으며, 가장 기본적인 형태는 고분자 필름의 양면이 전극으로 코팅되어 있는 형태이다.
고전압을 유전 탄성체에 인가하면 양면의 전극 사이에 전기장이 생성된다. 인가된 전기장에 의해 양극 사이에는 서로 끌어당기려는 인력인 Maxwell 인력이 발생하고 이 인력에 의해 고분자 필름은 면적이 넓어지고, 두께가 얇아지게 된다. 즉, 전기장을 인가함으로써 유전 탄성체는 얇게 펼쳐 지게 되는 것이다.
이 때 유전 탄성체의 작동을 위해 필요한 전압의 세기는 필름 소재의 두께 및 유전율 및 필름의 압축 모듈러스 등 다양한 조건에 영향을 받는다. 하지만 일반적으로 유전 탄성체를 작동시키기 위한 전압으로는 수 kV 의 고전압이 요구된다. 작동 전압이 고전압이라는 단점에도, 유전 탄성체는 다른 스마트 소재에 비해 형상 변형의 정도가 크고 반응 속도가 빠르다는 점 등의 장점 덕분에 소프트 로봇 연구에 활발하게 활용되고 있다.
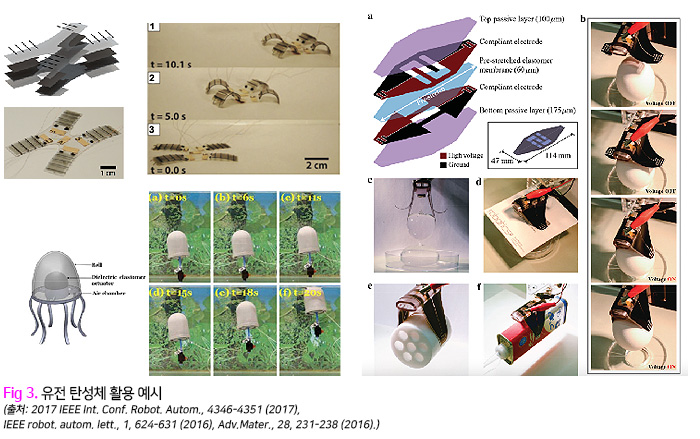
Fig 3은 유전 탄성체를 활용해 지상에서 빠르게 기어다닐 수 있는 로봇, 해파리의 움직임을 모사한 수중에서 움직일 수 있는 해파리 로봇, 날계란 등의 쉽게 부서질 수 있는 물건을 옮기기에 용이한 소프트 그리퍼 제작을 한 연구를 보여준다.
.jpg)
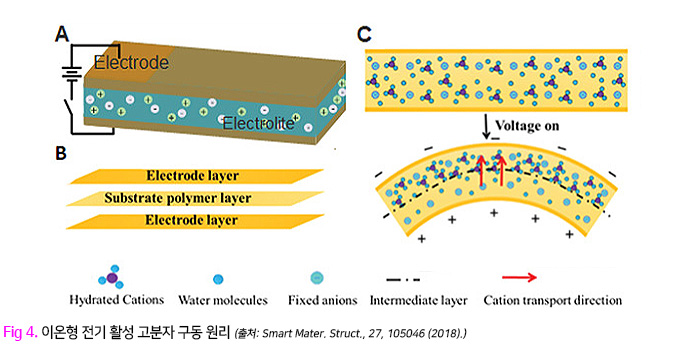
이온형 전기 활성 고분자(Ionic EAPs)는 전기형 전기 활성 고분자(Electronic EAPs)와 마찬가지로 전기장에 의해 동작된다. 하지만, 전기형 전기 활성 고분자의 작동 전압은 수 kV 에 달하는데 비해, 이온형 전기 활성 고분자은 수 V 만 인가해도 작동한다는 점에서 큰 차이가 있다. 이온형 전기 활성 고분자의 작동 원리는 Fig4와 같다.
이온형 전기 활성 고분자는 고분자 필름 양면에 전극이 있는 형태로 제작된다. 이온형 "전기 활성 고분자에 전기장을 인가하면 수화된 양이온이(Hydrated Cation) 음극으로 대전된 전극 방향으로 이동한다. 이온의 이동으로 양면의 전극 사이의 이온 농도 균형이 깨지게 되고 이온 농도의 불균형은 삼투 현상을 발생시켜 물 분자도 음극으로 대전된 전극 방향으로 이동하게끔 만든다. 그 결과 이온형 전기 활성 고분자는 음극으로 대전된 전극 부분이 늘어나고, 반대 부분은 수축되는 방향으로 구부러진다.
즉, 이온형 전기 활성 고분자는 전기장을 인가했을 때 유도되는 이온의 이동에 의존하여 작동되기 때문에 인가하는 전기장의 세기 및 폴리머 내 이온 농도를 제어하면 동작 정도를 제어할 수 있다.
이온형 전기 활성 고분자는 반응 속도가 느리다는 점, 이온 이동을 가능하게 하는 환경을 필요로 한다는 단점이 있으나,
낮은 전압으로도 구동이 가능하다는 등의 장점이 있기 때문에 다양한 소프트 로봇 제작에 활용되고 있다.
Fig 5는 자벌레를 모사한 인체 내부와 다리들이 번갈아 동작하는 소프트 로봇, 기존의 이온 폴리머-금속 복합체(Ionic polymer-metal compostite, IMPC) 보다 약 4 배 큰 변형율과 2 배의 힘을 보여주며 인공 근육의 가능성을 보여준 소프트 액츄에이터 등 이온형 전기 활성 고분자의 활용 예시를 보여준다.

.jpg)
형상 기억을 할 수 있는 소재는 형상기억합금(Shape Memory Alloy, SMA)와 형상기억고분자(Shape Memory Polymer)가 있다. 형상기억고분자는 형상기억합금에 비해 형상회복력이 우수하고 탄성력이 있고 유연한 소재이며 제조 비용이 저렴하다는 장점이 있다.
형상기억고분자는 임의로 변형된 형상에서 빛, 열, 자기장 등 외부 자극에 반응하면 프로그래밍 된 형상으로 형상 회복이 가능한 고분자 소재이다. 가령, Fig 6과 같이 B 형상으로 형성된 고분자가 A 형상으로 변형되어도 다시 외부 자극을 적용하면 초기의 B 형상으로 돌아올 수 있는 것이다. 이 때 형상 회복을 위한 외부 자극과 초기의 B 형상은 소재를 처음 제작할 때 설계할 수 있다는 장점이 있다. 이런 장점을 활용하여 형상기억고분자는 소프트 로봇, 의료기기, 전자 산업, 항공 산업 등 다양한 분야에서 연구되고 있다.
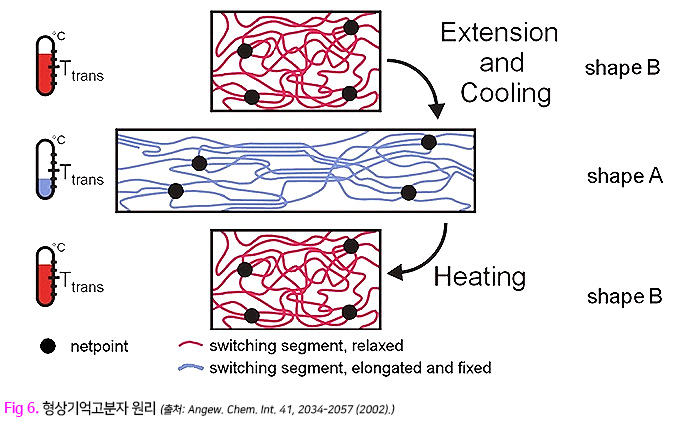
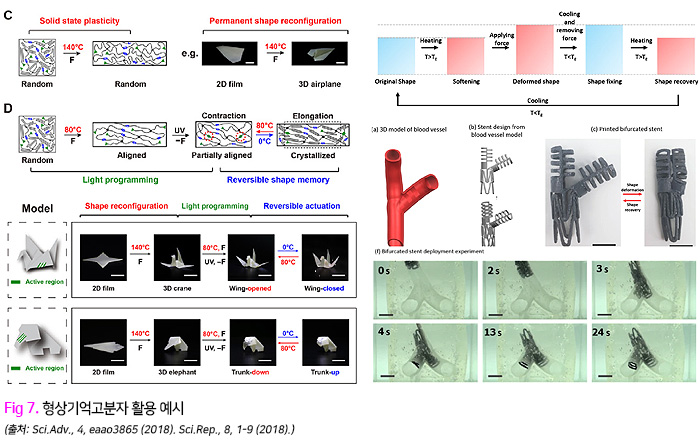
Fig 7은 형상기억고분자의 다양한 연구 중에서도 2 가지 예시를 보여준다. 첫번째는 열-가역적 결합과 광-결합적 결합을 모두 포함하는 형상기억고분자를 제작한 연구이다. 이 연구에서는 형상기억고분자로 제작한2D 필름에 열과 빛을 가하면 디자인 했던 3D 형태로 구조로 형상을 되돌릴 수 있다는 것을 보여주었다. 기존의 형상기억고분자들이 한 가지 자극에 반응하는 것에서 나아가 여러 자극에 반응하는 형상기억고분자를 제작함으로써 형상기억고분자의 가능성을 넓혔다.
두 번째 Fig7은 열에 반응하는 형상기억고분자를 3D 프린팅으로 출력해 제작한 스텐트(stent) 연구를 보여준다. 이 스텐트 제작에 사용된 형상 기억고분자는 유리 전이 온도(Tg)가 50 °C 이며 생체적합성이 낮은 소재를 사용하여 실제 인체에 삽입하기엔 무리가 있다.
하지만, 형상기억고분자의 특성을 활용한다면 인체 삽입시와 원하는 위치에서 스텐트의 모양을 달리할 수 있다는 장점을 보여주어 기존 스텐트의 한계를 극복할 수 있을 것이란 가능성을 보여주었다.
.jpg)
바이오 하이브리드(Bio-hybrid) 소재란 자연의 생물체에서 얻은 생체 소재와 사람이 일반 소재를 결합한 소재이다. 자연에서 영감을 받아 로봇의 구조, 형상을 제작하고 움직임을 구현하는 것 뿐만 아니라, 자연에서 얻은 소재 자체를 로봇 제작에 사용하기도 하는 것이다. 그 중 가장 대표적인 것은 골격근, 심근 세포 등 근육 세포를 활용한 바이오 하이브리드 소재이다. 근육 세포는 반복적인 수축과 이완을 할 수 있으며 이것을 소프트 로봇의 동력원으로 활용할 수 있기 때문이다.
Fig 8는 각각 쥐의 골격근를 동력원으로 하여 자벌레의 움직임을 모사한 소프트 로봇, 쥐의 심장근 세포를 동력원으로 하여 가오리의 형상과 움직임을 모사한 소프트 로봇을 보여준다.
첫 번째 로봇은 3D 프린팅으로 제작한 하이드로겔을 뼈대로 하며 전기 자극을 주면 하이드로겔 속의 쥐의 골격근 세포(C2C12)가 수축하는 원리를 이용하여 움직인다. 생체 내 활동 전위 생성에 필요한 신호를 모방하면 전기 자극으로 단백질 발현, 세포 정렬 및 골격근 분화를 유도 할 수 있는 것과 유사하다. 두 번째 로봇은 탄성체(elastomer) 윗 층에 뼈대 역할을 하는 금을 올리고 그것을 탄성체로 다시 덮은 뒤 쥐의 심근 세포를 키워 제작된다. 이 때 쥐의 심근 세포는 ChR2 라는 감광성 단백질을 이용해 광학적 자극에 반응하도록 설계한 심근 세포를 사용하였다.
따라서 해당 소프트 로봇은 빛을 조사하면 심근 세포가 수축되는 원리를 이용해 움직였다. 위의 두 로봇은 각각 가해주는 전기 자극과 빛의 조건을 달리함에 따라 로봇의 속도와 방향을 제어할 수 있다.

이처럼 바이오 하이브리드 소재를 사용하는 소프트 로봇은 생체 적합성이 높다는 장점을 바탕으로 약물 전달 등 의료 분야에서 널리 사용될 것을 목표로 연구되고 있다.
최근 2가지 구동 원리를 활용하여 움직일 수 있는 소프트 로봇 연구도 점점 이루어지고 있다.
앞으로는 여러가지 구동 원리를 하나의 로봇 제작에 집약하여 각 소재들의 여러가지 장점을 살린 소프트 로봇 연구가 더 활발히 이루어질 것이라고 생각한다. 그리고 더 나아가, 소프트 로봇과 기존 로봇의 장점들을 모두 가진 하이브리드 형태의 로봇도 연구되어 로봇의 가능성을 넓힐 수 있을 것이라 기대한다.
.gif)
|







.jpg)


(0).jpg)















