|

재난 대응 로봇은 태풍, 지진과 같은 자연재해, 인적/사회적으로 발생하는 재난 등의 상황에서 재난의 확산을 방지하고 피해를 최소화하며, 신속히 사고 대응이 가능한 로봇으로 정의될 수 있다.
근래에 발생한 대형 재난 사례로는 2011년 일본 도호쿠 지방 태평양 해역 지진으로 발생한 후쿠시마 제1 원자력 발전소 사고를 들 수 있다. 원자력 발전소에서 발생하는 사고는 고선량의 방사선을 동반하므로 초기 사고 대응에 어려움이 많다. 그런데도 아시모 등을 보유한 로봇 강국 일본에서는 원전 사고 초기 대처에 로봇을 투입하여 해결할 수 있을 것으로 기대했다. 하지만 로봇을 활용한 사고 대응은 제대로 시도되지 못했고, 결국 미국의 군사용 로봇들이 투입되어 사고 현장 모니터링에 활용되었다.
당시 로봇 연구자들은 수십 년간 개발해온 재난 로봇이 실험실을 떠나, 실제 현장에서는 무용지물이라는 것을 깨달았고, 이를 계기로 실제 활용 가능한 재난 대응 로봇의 필요성이 대두되었다.
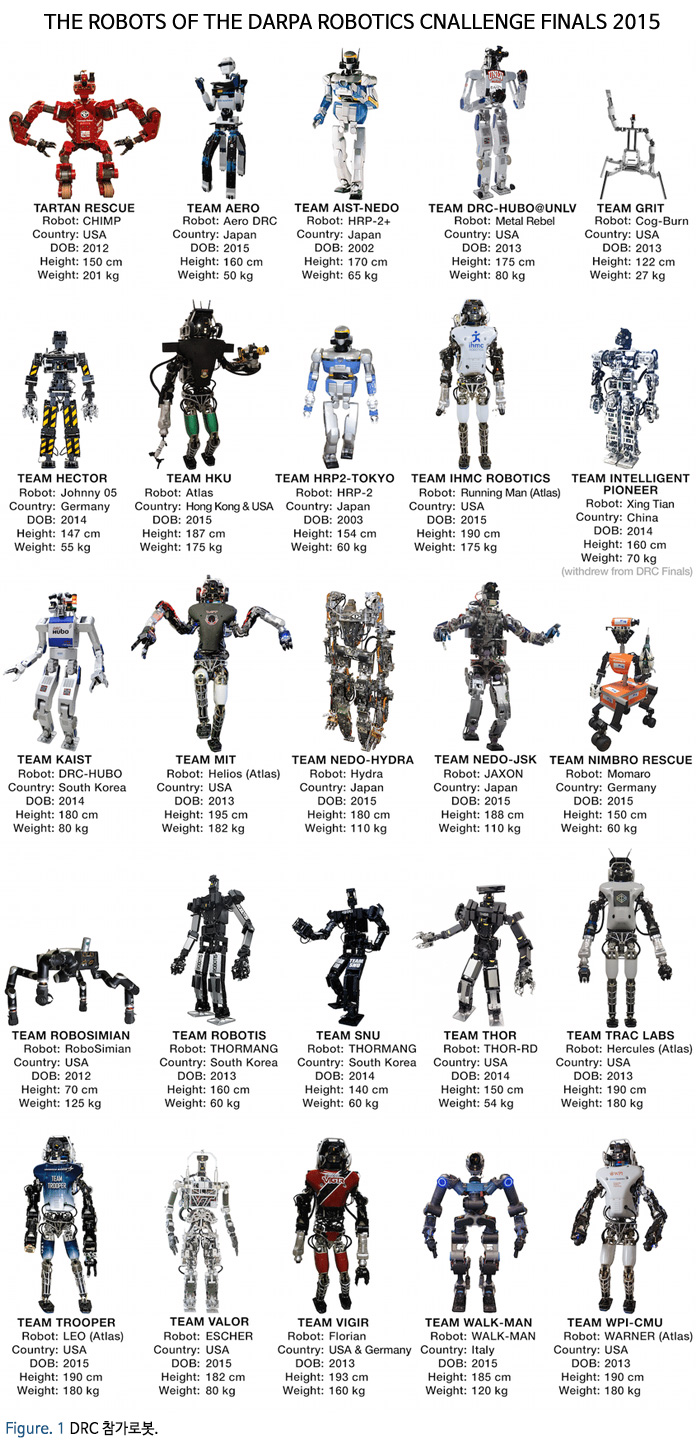
미국 방위고등연구계획국 (DARPA)에서는 일본 후쿠시마 원전 사고와 같은 재난 상황에서 인간 대신 임무를 수행할 수 있는 로봇의 개발을 목표로 <2015 다르파 로보틱스 챌린지 (DARPA Robotics Challenge)>를 개최하였다. 대회에 참가하는 로봇들은 가상 원전 사고의 시나리오를 기반으로 차량 운전, 문 열기, 냉각수 밸브 잠그기, 벽 뚫기 등 8가지 임무를 수행했다. 세계 각국의 24개 참가팀이 참여하였으며, 대한민국의 휴보는 44분 28초 만에 모든 미션을 완벽하게 수행해 8점 만점을 받아 1등을 차지했다.
다르파 로보틱스 챌린지를 통해 로봇 기술이 혁명적으로 발전하고 재난 로봇에 대한 가능성을 한층 더 높은 수준으로 끌어올리는 계기가 되었다. 또한 원전 사고, 화학 가스 누출 사고 등의 재난 현장에서 실제로 로봇을 투입하는 날이 곧 오게 될 것이라는 기대가 많았다. 하지만 이러한 장밋빛 기대와 달리 5년여가 지난 지금까지 실제 재난 현장에 투입되어 사용 가능한 로봇의 거의 전무한 것이 현실이다.
프랑스 로봇 제조업체 샤크로보틱스 (Sharks Robotics)가 개발한 콜로서스(Colossus)는 폭 76cm, 길이 160cm, 무게 500kg의 소방로봇이다. 콜로서스는 탱크처럼 무한궤도를 장착하여 울퉁불퉁한 지형을 지날 수 있으며 계단도 오를 수 있다. 또한 분당 약 2,500ℓ의 물을 발사할 수 있는 전동식 물 대포를 장착하고 있다. 약 250m 거리까지 방화수를 뿜어낼 수 있으며, 방수 및 방화 기능도 갖추었다. 최대 300m의 거리에서 원격 조종이 가능하고, 360도의 광학 줌 카메라를 탑재했다.
2019년 4월 프랑스에 노트르담 대성당에서 화재가 발생했을 때 콜로서스가 투입되어 화재 진압에 큰 공헌을 하였다. 목조건물의 노트르담 성당 지붕은 당시 붕괴 위험이 있어 소방관이 내부에서 화재 진압을 직접 실시하기 어려운 상황이었다. 소방대가 철수한 성당 내부로 진입한 콜로서스는 유리로 채워진 본당 내부의 온도를 낮춰 성공작을 화재를 진압하는 데 성공하였다.

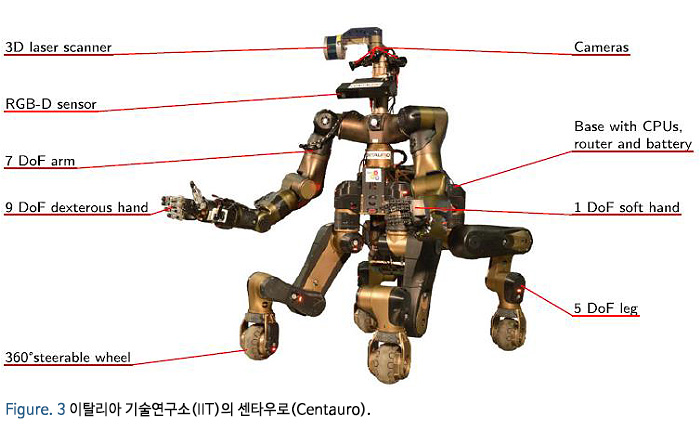
센타우로(Centauro) 로봇 프로젝트는 유럽연합의 Horizon 2020 프로그램의 지원받아 이탈리아 기술연구소 (IIT: Italian Institute of Technology)에서 진행되었다. 상체는 사람, 하체는 네다리를 가진 반인반마 형상을 채택한 센터 우로는 위험한 재난 환경에서 사람을 보조하여 중요임무 수행을 목적으로 한다.
센타우로는 키 1.5m, 몸무게 93kg이며 네 다리에는 바퀴가 부착되어 있다. 로봇은 알루미늄, 마그네슘, 티타늄 등의 경량 소재와 3D 프린터로 제작한 피부를 갖추고 있다. 배터리로 구동되며, 약 2.5시간 운용할 수 있다. 가반하중 11kg의 팔을 탑재하고 있으며 밸브 열기, 문 열기, 드릴 같은 도구 활용 등의 작업이 가능하다.
향후에는 이동성과 매니퓰레이션을 증대하고, 완전 자율, 원격제어 등 능력을 갖춘 로봇을 개발하여 실제로 재난 현장에 투입하거나 연구용 로봇으로 활용할 계획이다
미국 Boston Dynamics는 방위고등연구계획국, DARPA의 지원으로 휴머노이드형 로봇 개발 프로젝트를 진행했다. 기존의 군사용 인간형 로봇 펫맨(PETMAN)을 기반으로 사람에 가까운 동작을 하도록 설계된 아틀라스(Atlas) 로봇은 2015년 다르파 로보틱스 챌린지 이후 공개되었다.
아틀라스 로봇은 전동모터를 구동계에 사용하는 다른 로봇과는 달리 유압식 구동계를 사용한다. 28개의 유압식 구동계를 사용하며 키는 1.5m, 무게는 80kg, 약 11kg의 짐을 들을 수 있다. 무게와 공간을 절약하기 위해 금속 3D 프린팅을 이용해 제작되었으며, 스테레오 비전 카메라, 자이로, IMU 센서 등의 탑재로 환경을 인지하고 물체를 조작하며 거친 지형을 이동할 수 있다.
아틀라스 로봇은 사람들도 유지하기 어려운 고난도의 균형 조절 능력을 보여준다. 2017년에는 공중제비를 하는 영상, 2018년에는 비정형 야외 풀밭에서 달리기와 장애물을 넘는 영상, 최근에는 파쿠르를 하는 영상을 선보여 세계를 놀라게 했다.
초기에는 군사용을 염두에 두고 수색, 구조작업에 투입할 수 있는 능력을 갖춘 로봇을 개발하는 것이었지만. 향후에는 각종 재난 현장에서 사람을 구하는 작업에 투입할 계획이며 궁극적으로 사람과 동물에 필적하거나 뛰어넘을 정도의 이동성, 인지능력을 갖춘 로봇을 만드는 것을 목표로 하고 있다.


일본에서는 후쿠시마 원전 사고 이후, 재난 상황에서 작업자의 피폭 위험 없이 재난 환경에서 활용 가능한 로봇의 필요성을 절감했다.
일본의 자동차 기업 혼다에서는 아시모에 적용된 기술을 기반으로 E2-DR이라는 이름의 로봇을 개발했다. E2-DR은 키 168cm, 몸무게 85kg의 로봇으로 1,000Wh 리튬이온배터리를 탑재해 90분간 작동 가능하다. 2개의 회전식 레이저 거리 측정기, SR 4000 TOF(Time of Flight) 카메라, 적외선 카메라, 3D 센서 등을 갖추고 있다. 이동 속도는 2족 보행 시 시속 4km, 4족 보행 시 시속 2.3km이다.
E2-DR은 전작인 아시모에 비해 더 강하고 튼튼하면서도 민첩하게 행동할 수 있다. 180도 회전이 가능한 몸통으로 다리를 이용하지 않고 뒤로 돌아 작업을 할 수 있으며, 몸 두께가 25cm에 불과해 30cm 폭의 벽도 통과할 수 있다. 계단 및 사다리 오르기는 물론 좁은 틈새 통과하기, 둥근 파이프 위나 쓰레기 더미 통과하기, 네발로 기어가기 등 다양한 능력을 선보인다.
혼다에서는 실제 재난 상황에서도 무리 없이 기능들이 작동할 수 있게 방수 및 방진 기능을 갖추었으며, 영하 10도에서 최고 영상 40도의 온도에서 모든 기능이 정상 작동할 수 있다고 밝혔다


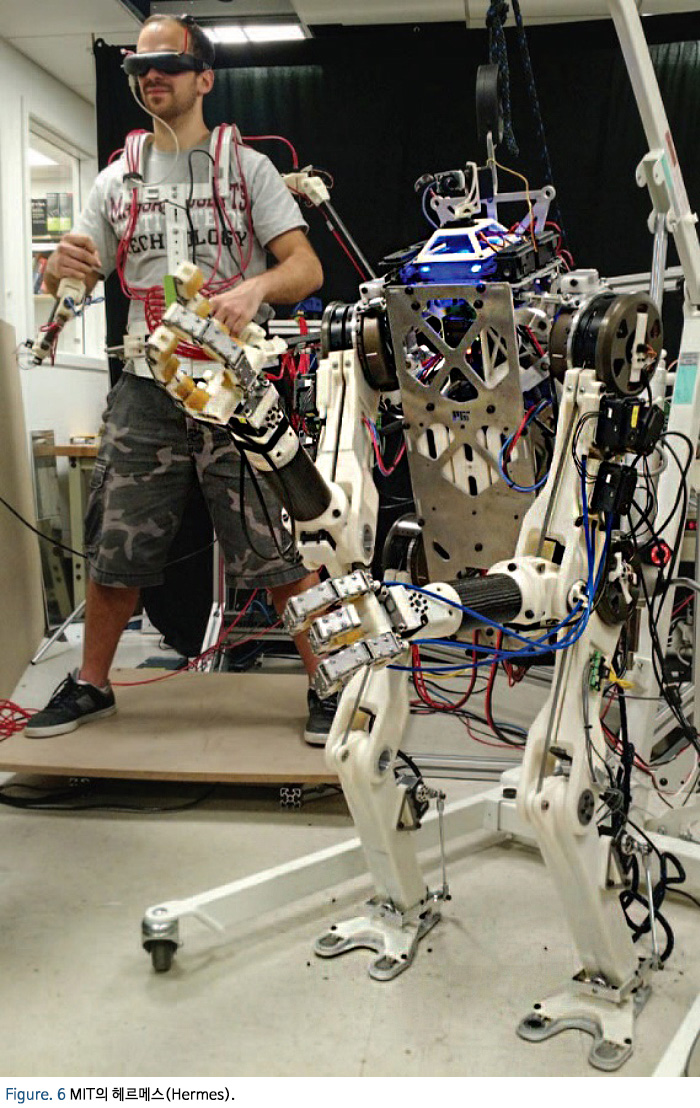
미국 MIT에서는 인간의 반사 신경처럼 빠르게 반응할 수 있는 원격 제어 재난 로봇 헤르메스(Hermes)를 개발했다 [7]. 외골격 형태 마스터를 착용하고 원격으로 조작하는 방식의 헤르메스는 성인 여성의 90% 수준의 키에 45kg의 무게이다. 팔과 다리는 각 6자 유도로 구성되어 있으며 인간과 같은 수준의 동작을 구현하는 데 초점을 두고 개발되었다.
헤르메스는 복잡한 임무를 자율적으로 수행을 하는 것이 목적이지만 현재는 사람이 직접 원격 조종을 한다. 로봇에 가해지는 충격은 조작자에게 전달되어 현장 상황을 감지하면서 작업 가능하다.
헤르메스는 사람처럼 순간적인 가속도를 활용하여 벽을 강하게 치고, 도끼로 목재 벽을 파괴하거나 소화기를 이용하여 불을 끌 수 있다. 로봇을 장시간 사용하게 될 경우 조작자는 쉽게 피로해지는데, 향후에는 이러한 정신적 피로를 줄이는 방향으로 개발을 진행 중이다.

한국원자력연구원에서는 일본 후쿠시마 원전 사고와 같은 원자력 비상상황에서 무인 대응을 하기 위한 로봇 연구가 진행되고 있다. 암스트롱(ARMstrong: Accident Response Manipulator) 로봇은 2018년부터 개발 중이며 원자력 사고 발생 시 사람을 대신해서 위험한 일을 해 줄 수 있는 것을 목표로 하고 있다.
유압 시스템을 적용한 암스트롱 로봇은 한 손에 100 kg의 물체를 들을 수 있으며, 양 팔을 동시에 사용하여 총 200 kg의 중량물도 핸들링 가능하다. 각 팔은 8자 유도를 가지고 있으며, 사람의 팔 구조를 모방하여 다양한 작업이 가능하다. 이동주는 무한궤도를 채택하여 다양한 지면에서 이동이 가능하고 바닥부터 2.2 m에 이르는 영역까지 몸을 굽혔다 펼 수 있어 높은 위치에서의 작업도 가능하다. 최대 이동속도는 6 km/h이며 500m 내에서 원격제어 가능하다.
암스트롱은 높은 페이로드를 기반으로 실제 현장에서 요구되는 다양한 임무를 수행하는 것을 목표이다.
최근 로봇 강국인 미국, 일본을 필두로 많은 국가에서 많은 재난 대응 로봇 개발이 이루어지고 있다. 현재까지 실제 재난 현장에 적극적으로 쓰인 사례는 적지만, 가상상황을 가정한 실험을 통해 효용성을 높이고 있다. 재난 로봇이 현실 세계에 발을 딛기 위해서는 다양한 문제의 해결이 필요하다. 로봇의 완성도를 높이는 것뿐만 아니라, 현장에 투입된 구조대원들과 원활하게 커뮤니케이션, 로봇 지휘 체계의 정립, 로봇 활용을 정당화할 수 있는 법정 정비도 마련되어야 할 것이다.
일본 후쿠시마 원전 사고로 촉발된 재난 대응 로봇은 다르파 로보틱스 챌린지를 거치면서 좀 더 명확한 목표를 가지고 연구되고 있다. 아직까지는 많은 문제를 해결해야 하지만 프랑스의 콜로서스 사례처럼 향후 재난 현장에서 소방관처럼 인명을 구조하고 원전 사고와 같은 극한 환경에서 인류를 보호하는 날이 오기를 기대한다.
참고문헌
1. 김상현, 박범영, 박재흥. (2015). DRC Finals 2015 - 참가팀들의 결과분석. 로봇과 인간, 12(4), 16-25.
2. http://www.econovill.com/news/articleView.html?idxno=361235
3. Max Schwarz et al, Remote mobile manipulation with the centauro robot: Fullbody telepresence and autonomous operator assistance, Journal of Field Robotics (8) (2020) 889-919
4. https://spectrum.ieee.org/robotics/humanoids/how-boston-dynamics-is-redefining-robot-agility
5. https://spectrum.ieee.org/automaton/robotics/humanoids/ihmc-teaches-atlas-to-walk-like-a-human
6. T. Yoshiike et al., "The Experimental Humanoid Robot E2-DR: A Design for Inspection and Disaster Response in Industrial Environments," in IEEE Robotics & Automation Magazine, vol. 26, no. 4, pp. 46-58, Dec. 2019, doi: 10.1109/MRA.2019.2941241.
7. A. Wang, J. Ramos, J. Mayo, W. Ubellacker, J. Cheung and S. Kim, "The HERMES humanoid system: A platform for full-body teleoperation with balance feedback," 2015 IEEE-RAS 15th International Conference on Humanoid Robots (Humanoids), Seoul, 2015, pp. 730-737, doi: 10.1109/HUMANOIDS.2015.7363451..
8. J. Ramos, A. Wang and S. Kim, "Robot-human balance state transfer during full-body humanoid teleoperation using Divergent Component of Motion dynamics," 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, 2016, pp. 1587-1592, doi: 10.1109/ICRA.2016.7487298.
9. 박종원, 최영수. “원자력 사고 대응 고하중 듀얼암 로봇,” KSME, 2-page, 2019.

|







(0).jpg)





.jpg)













