|
우주 쓰레기(Space debris or space junk)는 지구 저궤도(또는 정지궤도)에서 떠돌고 있는 모든 물체들을 이야기하며 수명이 다하거나 제어가 되지 않는 위성부터 충돌이나 폭발 등에 의해 발생하는 볼트 같은 작은 잔해물까지 그 종류와 크기는 다양하다. 우주 쓰레기에 대한 경각심을 일으킨 가장 대표적인 사건은 2009년 2월 러시아의 통신위성 코스모스 2251와 미국 통신위성 이리듐 33호의 충돌이다[1]. 러시아 위성은 고장이 난 상태에서 미국의 위성과 충돌했으며, 그로 인해 10 cm 이상의 우주쓰레기는 1420개, 1mm 이상의 우주쓰레기는 약 4백만개가 만들어져서 지금도 궤도를 떠돌고 있다[1]. 이에 유엔의 우주 공간의 평화적 사용을 위한 위원회(UN COPOUS, United Nations Committee on the Peaceful Uses of Outer Space)에서는 우주 기관간 우주 쓰레기 조정위원회(IADC, Inter-Agency Space Debris Coordination Committee)의 가이드 라인을 적용하여 UN 회원국과 국제기구들이 자율적으로 실행하도록 권고하고 있다[2].
해당 가이드 라인은 강제력이 없지만 이후 우주 쓰레기에 대한 심각성이 대두되고 이를 해결하기 위한 대안들이 나오고 있다. 우리나라는 2014년에 13번째 회원국으로 정식 가입하였으며, 한국항공우주연구원이 대표기관으로 매년 관련 회의나 활동에 참여하고 있다. 지구 궤도에서 운용 중인 국제 우주 정거장의 경우에도 이런 우주 쓰레기로 인한 기체 파손을 막기 위해 각 모듈에 Whipple 차폐막을 설치하지만 지속적인 파손으로 수리 및 교체가 이루어지고 있다[3].
Whipple 차폐막은 일정한 간격을 가진 여러 층의 판으로 구성되어 있으며, 외부 판이 파손되거나 찢겨도 내부의 판들이 연속적으로 충격이나 2차 보호를 하도록 되어 있다. 하지만 우주쓰레기의 크기나 수량이 많다 보니 whipple 차폐를 하더라도 내부 기체의 손상을 완전히 막지는 못한다.
이와 같이 증가하고 있는 우주 쓰레기와 이로 인한 피해를 줄이기 위해서는 IADC의 가이드라인에 따라 향후 발사되는 발사체나 인공위성 사용에 있어 궤도 공간에서의 위성간 충돌 방지, 폭발, 파괴 금지, 잔해물이나 수명이 다한 위성들은 지구 재진입을 통한 자연 소각이 되도록 설계 및 운영이 되어야 한다. 하지만 이미 지구 주위를 떠돌고 있는 우주 쓰레기들은 운용 중인 위성이나 앞으로 발사할 우주 발사체에게는 치명적인 위험요소이다. 현존 하는 우주 쓰레기를 줄이거나 통제하기 위한 최신 동향에 대해서 소개를 하고자 한다.
지상에서 우주 쓰레기를 추적하는 방법은 라디오 전파를 우주로 보내 반사되어 오는 신호를 전파만원경으로 포착하거나 광학적으로 추적하는 방법이 예전부터 사용된 방법이다. 미합동 우주 전략 사령부는 지상 레이더와 천체 망원경을 사용하여 지속적인 감시를 하고 있으며 2009년버전의 보고서에는 약 19000개의 대형 파편들이 보고된 바가 있다[4].
그 외에 유럽우주국의 Space Debris Telescope(스페인), TIRA(Tracking & Imaging Radar, 독일), GDSCC(Goldstone Deep Space Communication Complex, 미국 캘리포니아), MIT(Massachusetts Institute of Technology)의 Haystack 관측소(미국 미사츠세츄), EISCAT(비간섭 산란 레이더, 스칸디나비아 반도 북부) 등에서 수집된 정보들을 공유하면서 지구 주변의 우주 쓰레기를 추적 및 관리하고 있다[4].

2007년 중국이 수명이 다한 인공위성 FengYun 1C 요격실험을 하면서 우주 쓰레기가 급격히 증가하였다. 이에 우리나라에서 운용하고 있는 아리랑 1호, 2호와의 충돌위험 분석을 위해 한국항공우주연구원에서는 2010년에 “우주파편 충돌위험분석 시스템 핵심 기술 연구”를 시작하였고, 한국천문연구원은 2010년 “NAP(National Agenda Project) 우주 물체 전자광학 감시체계 기술 개발”을 시작하였다[5].
한국항공우주연구원에서는 KARISMA(KARI Space Debris Collision Risk Management) 소프트웨어를 2014년에 개발하여 사용 중이다. KARISMA는 미합동 우주 전략사령부와 유럽 우주국으로부터 우주 쓰레기 관련 데이터를 받아 시뮬레이션화하여, 충돌위험 분석, 위성 궤도 조정 등 국내에서 운용중인 위성이나 우주 발사체와 우주 쓰레기 충돌 방지를 위해 사용되고 있다[5].
인공위성에 장착된 반사경은 전파 반사를 위해 사용되는데 레이저를 사용한 반사 측정을 하면 예측 궤도 정보(Consolidated Prediction Format, CPF)를 통해 인공위성까지의 거리를 센티미터 수준으로 정밀하게 측정 가능하다[6].
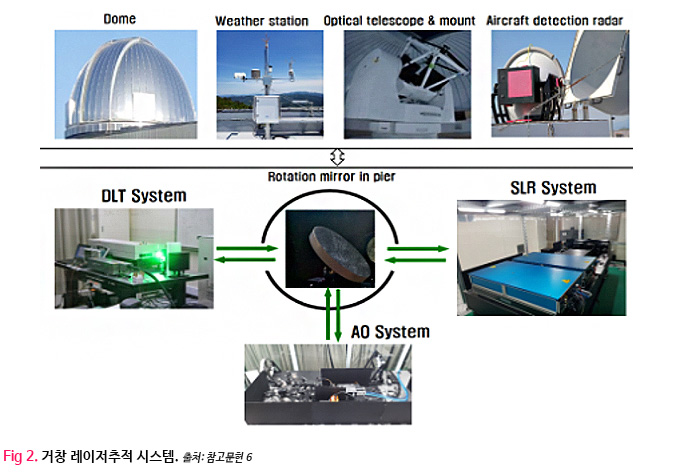
레이저 반사경이 없는 우주 쓰레기의 경우 현재 기술로는 5 cm 크기까지 추적이 가능하다. 반사경이 있는 인공위성에 비해 레이저 유효면적(laser cross section)이 크게 줄어들어 고출력 레이저를 사용한다 하더라도 1000km 거리에서 10 개 이하의 입자만 검출이 가능하다. 현재 우주 쓰레기 분포와 관련된 정보를 외국 기관에 의존하기에 국내 자체 관측을 위해 국내에서는 한국천문연구원이 호주 EOSSS(Electro Optic Systems Space Systems)와의 공동연구로 2019년부터 거창 레이저 추적 시스템을 개발 및 시험 운용 중이다[6].
레이저를 지상에서 발진하여 고도 250km ~ 2500km 상공의 인공위성 추적이 가능하다. 거창 레이저 추적 시스템은 인공위성 레이저 추적(SLR, Satellite Laser Ranging), 적응 광학(AO, Adaptive Optics), 우주쓰레기 레이저 추적(DLT, Debris Laser Tracking) 시스템으로 구성되어 있다. 여기서 인공위성 레이저 추적과 적응 광학은 개발이 완료되어 2019년부터 시험 운용 중이며, 우주 쓰레기 추적 시스템은 아직 개발 단계이다. 하지만 현재 운용중인 적응 광학 장치는 고도 1000 km 이하에서 10등급 보다 밝은 우주 쓰레기의 영상 촬영이 가능하기에 대형 우주 쓰레기 관측은 가능한 것으로 보여진다[6].
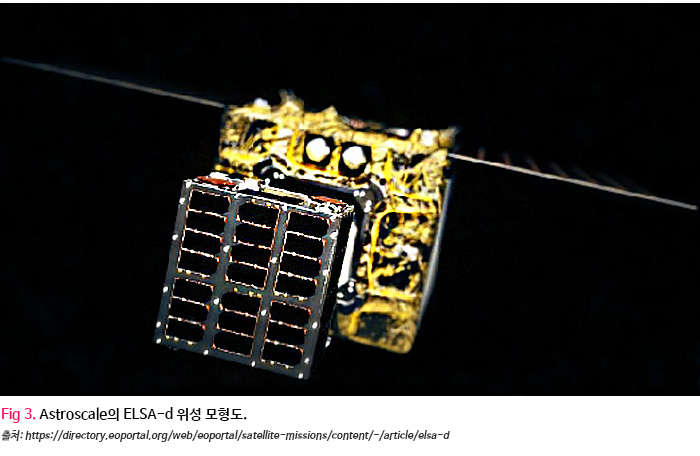
일본에 본사를 둔 Astroscale은 2013년 지속 가능한 우주 사용을 위해 창업한 업체로 우주 쓰레기 제거를 주 목적으로 한다[7]. 이 업체는 영국, 미국, 이스라엘, 싱가폴에 지사가 있으며 2017년 11월 영국의 SSTL(Surrey Satellite Technology Ltd. Of Surrey)과 깨끗한 우주 환경을 위한 장기 프로젝트 계약을 맺는다. 그 프로젝트의 연구결과로 ELSA-d(End-of-Life Service by Astroscale-demonstration)미션이 수행되었다. ELSA-d는 추적(Chaser)위성과 타겟(Target) 위성으로 구성되어 있으며 궤도에 안착하게 되면 타겟 위성의 분리와 포획 미션을 3회에 걸쳐 수행하게 된다. 자석 시스템을 이용해서 타겟 위성을 포획하게 되며 3가지 미션은 자석 시스템을 이용하여 타겟 위성의 속도를 줄이거나 자세 조절 등이다. 추적 위성은 타겟 위성을 포획한 후 다시 원궤도로 복귀한다. 이 실험은 실제 임무가 종료되었거나 손상된 죽은 위성을 포획하여 궤도 내부로 보내어 대기 진입 시 소각 되도록 하는 방법을 시뮬레이션 하는 것이다. 추적 위성의 무게는 약 180 kg이며, 타겟 위성은 약 20 kg으로 지상에서의 원격 지시를 통해 임무가 수행된다. ELSA-d는 2021년 3월 카자흐스탄에서 소유즈 발사체로 발사될 예정으로 세계에서 처음으로 우주 쓰레기 제거 관련 실험이 수행될 예정이다.
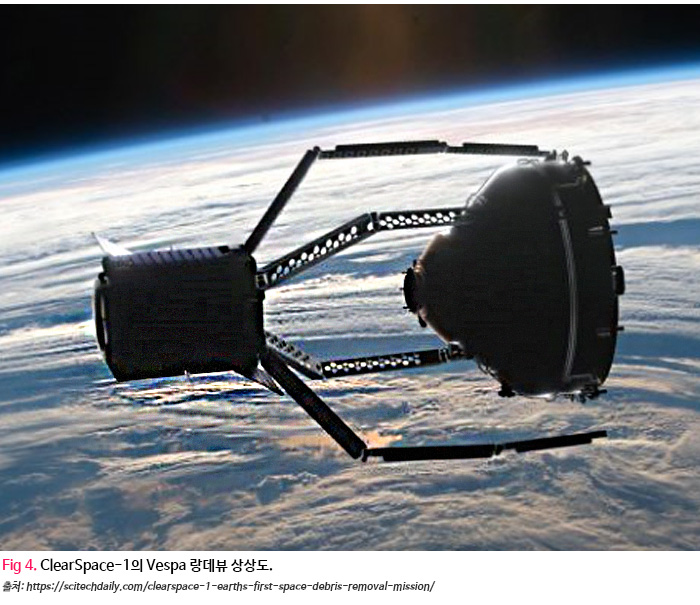
유럽 우주국(ESA)은 스위스의 신생기업인 ClearSpace SA와 계약하여 ClearSpace-1 미션을 진행중이다[8]. 이는 2013년 유럽의 발사체인 Vega의 상단 탑재체 연결부 Vespa (112 kg)가 ‘점진적 처분(gradual disposal)’ 궤도인 고도 801 km에서 644 km에 존재하며 우주 쓰레기 저감 규약에 따라 제거하기 위해서이다. ClearSpace-1 추적 위성은 무게 약 500 kg으로 2025년에 Vega-C 발사체로 발사될 예정이다. ClearSpace-1에는 카메라, 레이더, 항법용 LIDAR, 4개의 촉수처럼 생긴 다리가 위성을 잡도록 설계되어 있다. ClearSpace-1은 500 km 궤도에서 통신 및 제어 테스트가 수행된 후 해당 미션을 위해 궤도 이동을 해서 쓰레기 위성을 잡아서 지구 대기권으로 진입하여 대기마찰열에 의해 폐기하는 방법을 진행할 예정이다. 아직 공식적인 계약은 되어 있지 않지만 ClearSpace-1의 첫 임무가 성공적으로 수행된다면 OneWeb, Iridium, Piquet와 같은 일련의 통신위성을 운용하는 기업들과도 협력이 예상된다. 여러 대의 통신 위성을 운용하면서 고장이 발생하거나 폐기해야 될 경우 CleasSpace-1은 대형 통신 위성을 별도로 통제가능하기 때문이다.
앞서 소개한 우주에서의 우주 쓰레기 제거를 위한 시험 비행이나 미션 일정이 정해진 것 외에 다양한 우주 쓰레기 제거 방법들이 시뮬레이션이나 연구실에서의 모사 시험 등으로 진행 중이다. 우주 쓰레기 제거 방법은 앞서 보인 방법들과 같이 여러 개의 다리나 접착식 줄을 이용하는 직접적인 접촉을 하는 방법과 레이저, 이온빔 등을 이용한 비접촉 방식 등으로 크게 구분된다.
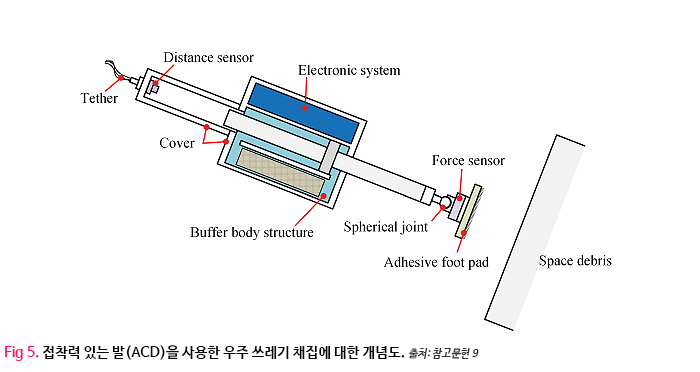
줄(tether)을 사용하는 방식에서 확장하여 도마뱀붙이의 생물학적 특성을 모사한 개념(ACD, Adhesion Capture Method)이 연구되고 있다[9].
이는 우주쓰레기를 처리하는 모선(인공위성)에서 줄에 연결된 상태에서 우주 쓰레기 채집용 발(foot pad)이 발사가 된다. 우주 쓰레기에 접근하게 되면 전자기 유체(MRF, Magnetorheological fluid)에 의해 접착력이 있는 발을 내보내 부착하는 방식이다. 줄을 사용하는 방법은 전자기를 발생하여 작은 입자를 붙게 하거나 올가미 형태로 위성을 붙자는 방식들이 고려되었으며 참고문헌[9]과 같은 방법은 줄을 사용하는 방법 중에서는 구체적으로 접근한 방식이다. 이와 같은 방식을 사용하기 위해서는 어느 정도 표면적이 존재하는 소형 위성보다 큰 우주 쓰레기에 적용할 것으로 판단된다.
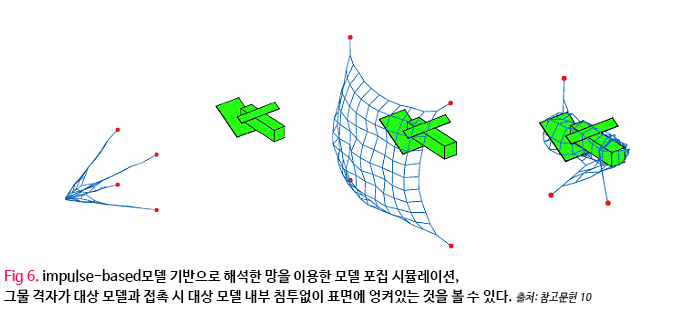
어느 정도 크기가 있는 중대형 우주 쓰레기는 거미 발이나 ACD가 연결된 줄을 사용하여 수거가 가능하지만 소형 우주 쓰레기의 경우는 망(net)을 사용하는 방법이 주로 연구되고 있다. 수치해석을 사용한 동적 해석 연구가 주로 진행 중이며 참고문헌[10]에서는 사냥을 할 때 그물이 달린 총을 발사하여 동물을 포획하는 방법처럼 4 개의 총알이 달린 망을 발사하여 소형 우주 쓰레기를 포착하는 메커니즘을 비교하고 있다[10].
일반적으로 penalty-based model과 impulse-based model이 자주 사용되며 이 두 모델에 대한 비교 해석을 하였다. Penalty-based model의 경우 접촉하는 면의 침투 함수로 지속적으로 표현이 된다. 해당 접촉면에 대한 침투 함수로 계산이 되기 때문에 계산은 단순하지만 큰 접촉 강경도(contact stiffness)가 요구되며 접촉면이 다른 이종의 물질의 경우 적절한 접촉 강경도 해석이 어려워지는 단점이 있다. Impulse-based model은 접촉 물질에 대해서는 임펄스를 계산하는 것으로 상호 침투를 막기 위해 속도 차이를 계산하면 된다. 일반적으로 게임 환경이나 현실 강화 시뮬레이션에서 두개의 분리된 물체의 접촉 계산에 주로 사용되는 방법이다. 두 해석 방법을 비교했을 경우 impulse-based model이 망과 물체의 접촉 시뮬레이션에 적합하며 해설 모델 간 침투 방지(penetration avoidance)(즉 3차원 모델링 시 두 물체가 서로 붙어 있을 경우 서로 내부로 침투하여 겹쳐지는 현상)와 해석 견고성에 유리 하며, penalty-based model은 계산이 매우 간단하다는 장점이 있다.
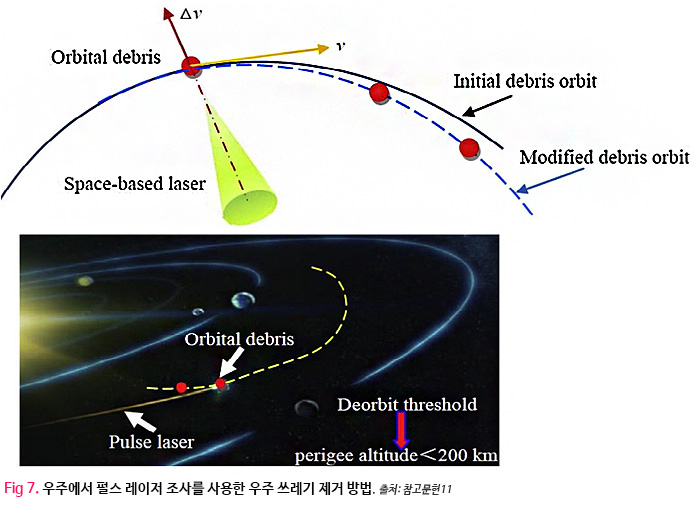
집게 발이나 망을 사용하는 방법 외에 비접촉 방식으로 우주에서 임펄스나 레이저를 사용하는 방법이 있다. 이는 비교적 빠른 속도로 비행하는 작은 우주 쓰레기에 적용 가능하며, 여러 번 재사용 가능하다는 장점이 있다.
기본적인 개념은 우주 공간에서 레이저를 발사할 수 있는 위성을 위치시켜 소형 우주 쓰레기가 근처를 지나게 되면 펄스 레이저를 조사한다. 레이저를 우주 쓰레기의 표면에 조사하게 되면 알루미늄 재질(일반적으로 위성에 사용되는 재질) 표면에서 플라즈마 팽창에 의한 반작용으로 속도 변화를 일으켜 우주 쓰레기의 궤도가 변하게 된다. 일반적으로 저궤도에서는 근지점 2 X 105 m에서 궤도 변화가 가능하며 이 근지점 고도보다 낮게 되면 우주 쓰레기의 비행 궤도는 지구 대기권으로 진입하게 된다. 우주에서 사용하는 레이저는 지상에서처럼 고출력 레이저를 사용하기 힘들며 펄스 레이저를 사용하게 되며 나노초 단위로 조사하게 된다. 이 경우 레이저 에너지 밀도, 우주 쓰레기 표면적 당 압력 등의 변수가 우주 쓰레기의 속도 변화에 영향을 미치는 변수이다. 또한 우주 쓰레기의 형상, 밀도, 속도 진행 방향 등의 변수가 많기 때문에 이에 대한 추가적인 연구 등이 필요하다.
우주 쓰레기의 경우 통신, 기상, 정찰 위성 등 활용도가 높은 지구 저궤도에 집중되어 있다. 폐기 위성, 발사체 부속품 등 중대형 크기에서 볼트나 금속 조각 등 소형 크기까지 다양하게 존재하며 빠른 속도로 비행하는 우주 쓰레기는 우주 공간에서는 매우 위협적인 존재이다. 우주 발사체를 쏘아 올리는 것 자체가 많은 비용과 기간이 소요되는 만큼 현재는 우주 쓰레기의 분포, 이동 등 우주 쓰레기 관측과 관리가 중점적으로 이루어지고 있다. 이와 같은 자료를 토대로 현재 발사되거나 발사될 위성의 궤도, 비행 속도 등을 조절하고 있다. 하지만 관측되지 않는 우주 쓰레기들이 존재하기에 우주 쓰레기 제거는 향후 우주개발을 위해 반드시 필요한 사항이다.
대형 우주 쓰레기는 하나하나 잡아서 지구 대기권으로 재진입시키고, 소형 우주 쓰레기는 망, 줄, 레이저, 이온 빔 등으로 궤도 변경을 통해 제거하는 방법들이 주로 고려되고 있다. Astroscale사의 우주 쓰레기 제거 방법처럼 여러 대의 큐브 위성을 이용한 우주 쓰레기 제거가 경제성과 안정성을 고려했을 때 가장 효율적인 방법으로 판단되지만 논문들에서처럼 움직이는 물체를 추적해서 접촉하거나 비접촉 방식으로 속도 변화를 주어 궤도 전환을 하는 것은 매우 복잡하고 변수가 많기에 이에 대한 많은 연구들이 필요하다.
.jpg)
|







(0).jpg)





.jpg)













