


박경서(University of Illinois at Urbana-Champaign)
2022-06-13
| 로봇 기술이 발전함에 따라 로봇의 응용 분야는 기존의 산업용 로봇에 국한되지 않고, 사람과 공간을 공유하는 서비스 로봇 또는 협업용 로봇으로 확장되고 있다. 이러한 로봇들은 인간과 동일한 작업 공간을 공유하고 있으며, 로봇 주변의 사물과 사람은 시간에 따라 변한다. 즉, 로봇 주변의 환경은 비구조화(unstructured) 되어있으므로 인간과 로봇은 서로 물리적으로 상호작용할 수 밖에 없다. 인간과 로봇 사이의 물리적 접촉은 사람의 안전에 중대한 위협이 되지만, 효율적이고 직관적인 의사소통의 통로가 되기도 한다. 따라서, (1) 충돌과 같은 위험한 상호작용의 심각성을 낮추면서도 (2) 접촉의 강도와 위치 및 특징을 인지하는 능력을 로봇에게 부여하는 것은 로봇 교시나 인간-로봇 협업과 같은 물리적 인간-로봇 상호작용 (physical Human-robot Interaction, pHRI)을 구현하는데 필수적인 기술이다. 유연 로봇 피부는 위와 같은 요구조건을 달성하기 위한 효과적인 방법으로 여겨진다. 유연 소재 기반의 로봇 외피는 예기치 못한 충돌에 의한 부상과 같은 리스크를 소재 자체의 충격 흡수 능력을 바탕으로 완화시킬 수 있다 [1]. 또한, 촉각 센싱 능력은 로봇에 가해지는 외력이나 접촉 등에 대한 정보를 제공하여, 로봇이 충격을 완화하도록 움직이는 것을 가능케 한다. 또한, 물리적 접촉의 특징을 바탕으로 접촉의 종류나 의도를 인지하는 것도 가능하다 [2]. 따라서, 로봇의 넓은 표면을 커버할 수 있으면서도 충돌로 인한 위험 완화와 (3) 다양한 종류의 촉감 인지가 가능한 전신 로봇피부를 만들기 위한 연구가 계속되고 있다. 하지만, 이러한 요구조건을 만족하는 전신 로봇피부를 만드는 것은 기존의 촉각 센서 기술로는 한계가 있다. 왜냐하면 센서의 사용 목적과 디자인 목표가 주류 촉각센서와 다르기 때문이다. 예를 들어, 작은 스케일의 어플리케이션(e.g., 로봇 손)을 위해 개발된 촉각 센서의 경우 배선이나 내구성, 가격 문제로 인해 대면적 배치가 불가능한 경우가 많다. 또 일부 연구의 경우 실험실과 같이 정돈된 환경에서는 잘 작동하지만 실제 필드에서는 쉽게 망가지거나 오작동을 일으키는 경우가 많다. 따라서, 실용적인 전신 로봇피부는 성능 뿐만 아니라 내구성, 제작성, 배치 및 배선, 로봇과의 통합성 등을 모두 고려하여 디자인 될 필요가 있다. 이러한 연구 방향에 부합하는 연구 사례 중 몇가지를 제시하면 다음과 같다. 모듈형 전신 로봇피부는 넓은 곡면 형태의 센서를 한번에 만드는 대신, 작은 크기를 갖는 여러 개의 센서 모듈을 이어 붙여 로봇의 표면에 배치한다. 각 모듈은 유연 기반(flexible PCB)로 제작되어 약간의 변형이 가능하며, 다양한 상용 센서를 탑재하여 여러 종류의 물리적 자극을 인지할 수 있다. 또한 인접한 모듈들은 서로 연결되어 이어지며, 각 센서에서 얻어진 데이터는 측정 위치에 대한 정보와 함께 시리얼 통신을 통해 호스트로 전송된다. 이러한 접근법은 시스템에 높은 확장성(scalability)을 부여하여 임의의 형상을 갖는 대면적 촉각 센서를 손쉽게 구현할 수 있도록 한다. Fig 1은 이탈리아 IIT (Instituto Italiano Di Technologia) 연구팀에서 개발한 로봇피부를 보여준다. Schmitz et al.은 Flexible PCB를 사용하여 삼각형 형태의 센서 모듈을 개발했다 [3]. 각 모듈은 여러 개의 정전용량 패드를 가지고 있으며, 모듈 위에 배치된 유연소재 층과 전도성 레이어에 가해진 변형을 바탕으로 수직방향 힘을 측정할 수 있다. 또한 각 모듈은 휘어지는 것이 가능하여 iCub 로봇이나 Nao 로봇을 위한 로봇 피부를 제작하는 것이 가능했다. 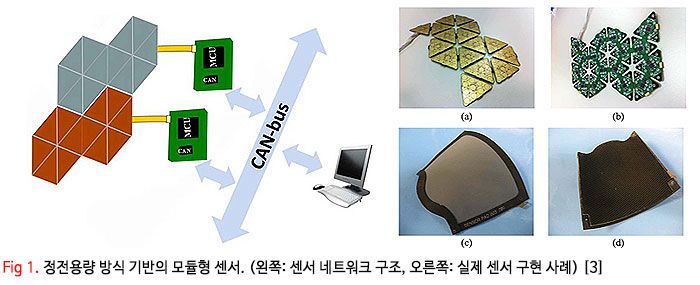 또한, IIT 연구팀은 시리얼 통신 (i.e., I2C) 방식의 대역폭 한계를 극복하기 위해 신호의 변화를 바탕으로 데이터를 전송하는 Event-driven encoding 방식을 제안했다 (Fig 2) [4]. 대부분의 pHRI 시나리오에서 로봇에 가해지는 물리적 자극은 상당히 일시적이고 국부적으로 발생하기 때문에, 센서의 모든 위치에서 지속적으로 데이터를 전송 받는 것은 매우 비효율적이다. 따라서, 이 연구는 실제 가해진 자극만을 선별하여 호스트로 전송하는 방식을 모듈형 로봇 피부에 적용함으로써 효율적인 데이터 전송을 가능하게 했다. 더 나아가서, IIT 연구팀은 iCub로봇에 모듈형 로봇 피부를 장착하여 외력을 인지하고 자세를 제어하는 것 또한 가능함을 보였다 [5]. 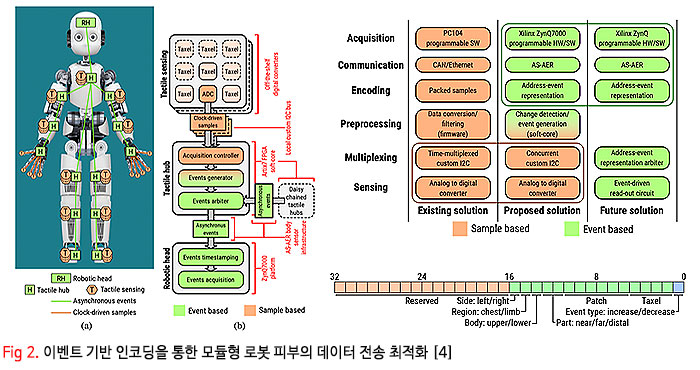 독일 TUM (Technische Universität München) 연구팀 또한 비슷한 방법으로 로봇 피부를 구현했다 (Fig 3) [6]. Mittendorfer et al. 은 육각형 형태의 센서 모듈을 개발했으며, 각 모듈은 광 센서, 가속도계 등을 탑재하여 다양한 물리적 자극을 측정하는 것이 가능하다 (i.e., 힘, 진동, 온도, 근접성). 각 센서 모듈은 인접한 모듈과 연결되며, 모듈마다 배치된 microcontroller를 활용하여 모듈 레벨에서의 신호처리를 함으로써 이벤트 기반의 데이터 전송 기능을 가능케했다. 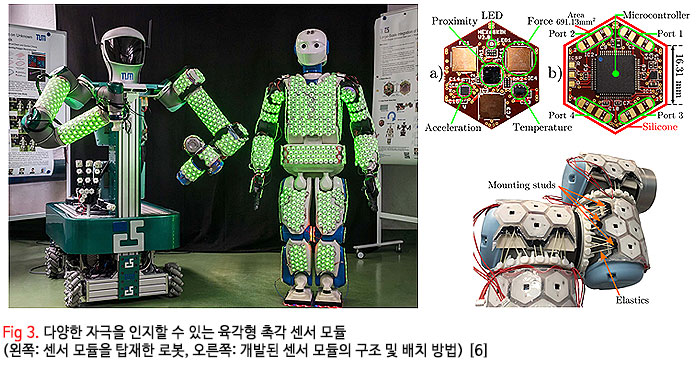 이러한 사례들은 측정 영역의 모듈화 및 시리얼 통신을 통해 높은 확장성을 가진 모듈형 전신 로봇피부를 구현할 수 있음을 보여준다. 또한 통신 방식의 최적화를 통해 제한된 환경에서 효율적인 데이터 전송이 가능하고, 상용 센서들을 활용하여 대량 생산에도 용이함을 보여준다. 그러나 각 센서 모듈은 변형이 불가능하여 구형이나 안장 형태의 곡면 (Gaussian curvature ≠ 0)에는 배치되기 곤란하며, 배선이 외부로 노출되는 경우 망가지기 쉽다는 한계점이 있다. 다음으로, 공압 패드를 로봇에 배치하여 안전한 인간-로봇 협업 환경을 구현하는 방법도 있다 (Fig 4). 대표적인 사례는 오스트리아 Blue Danube Robotics에서 개발한 AIRSKIN으로, 압력계가 내장된 복수의 공압 패드를 로봇의 표면에 배치하는 방식을 갖는다. 공압 패드에 힘이 가해지면 패드 내부의 압력이 변하고, 이를 압력계로 측정하는 원리로 동작한다. 이 방식은 모듈형 센서와 비교하여 구조와 작동 원리가 비교적 간단하며, 공압 패드 자체의 기계적 특성을 바탕으로 충격 흡수 효과 또한 기대할 수 있다. 또 내부가 비어 있어 무게가 가볍다는 것도 큰 장점이다.  공압 패드 방식은 로봇의 형상에 따라 맞춤 제작을 해야 한다는 점에서 모듈 방식과 차이가 있지만 그만큼 다양한 부위에 장착이 가능하며, 자석을 통한 탈부착이 가능하여 배치와 교체가 쉽다는 장점이 있다. 하지만, 공압 패드 방식은 단일 패드 내에서 자극의 위치를 국지화 하는 것이 불가능하며, 같은 패드 내의 여러 위치에 접촉이 발생한 경우 이를 구분해내는 것 또한 불가능하다. 이러한 공간분해능의 한계는 contact-rich한 어플리케이션을 구현하기에는 부족하지만, 안전한 물리적 인간-협업 환경을 실현하기에는 충분히 실용적인 솔루션이라 평가되고 있다.  한편 단층촬영법을 활용하여 로봇 피부를 만드는 연구도 활발히 진행되어오고 있다. 단층촬영법이란 투과파를 사용하여 여러 방향에서 얻은 데이터를 통해 물체의 내부 정보를 이미징하는 기술을 의미한다. CT촬영처럼 여러 방향에서 찍은 X-ray 사진을 합성하여 단면 이미징을 얻는 것이 대표적인 예이다. 이 때, X-ray 대신 가시광선이나 음파, 전류 등 다양한 투과파를 사용하면 물체의 광산란 특성이나 전기전도성, 음향 임피던스와 같은 특성을 이미징 하는 것이 가능하다. 예를 들어, 전기 임피던스 단층촬영법 (Electrical Impedance Tomography, EIT)은 비침습 의료 이미징의 한 종류로, 물체 (혹은 신체) 내부의 임피던스의 분포를 이미징하기 위해 복수의 전극을 활용한다 (Fig 5). 각 전극들은 전도성 도메인의 내/외부에 배치되어 있으며 전류 주입 및 전압 측정에 사용된다. 이 때 여러가지 전극 조합에 대해 해당 작업을 진행하여 측정 데이터를 얻어내면, 측정 데이터를 바탕으로 역문제를 풀거나 심층신경망을 활용하여 물체 내부의 전기 임피던스 분포를 재구성하는 것이 가능하다. 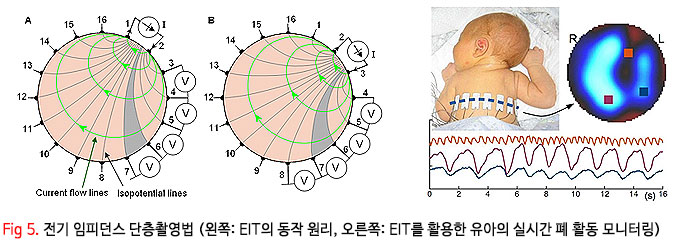 이러한 원리를 바탕으로, 한국과학기술원 (KAIST) 기계공학과 생체기계연구실과 독일 막스 플랑크 연구소 (Max Planck Institute for Intelligent System)은 전기 임피던스 단층촬영법 (EIT) 기반의 대면적 로봇 피부를 개발했다 (Fig 6) [7], [8]. 이 방식의 로봇 피부는 (1) 표면에 분산 배치된 복수의 전극과 그 위에 형성된 (2) 압저항 특성을 갖는 층으로 구성된다. 압저항층에 가해진 외력은 전기 임피던스의 분포를 국소적으로 변화시키고, 이러한 변화를 EIT를 통해 측정하는 동작 원리를 가지고 있다. 이러한 구조는 대면적 곡면의 형태를 띈 로봇 피부를 제작하는데 매우 큰 이점으로 작용한다. 예를 들어, 로봇의 표면에 전극을 임베딩 한 후, 표면에 압저항 소재를 스프레이 코팅하거나 압저항 구조를 형성함으로써 로봇에 촉각 감각을 부여하는 것이 가능하다. 또 배선이 로봇의 외부로 노출되지 않아 충돌에도 강건하며, 압저항 레이어에 손상이 발생하더라도 손쉽게 수리가 가능하다. 이는 로봇 피부의 내구성 및 유지보수에 상당한 이점으로 작용한다. 또한, EIT 기반의 로봇 피부는 고유한 작동 원리 (여러 전극조합을 통한 전류 주입 및 전압 측정) 덕분에 전극 수 대비 높은 공간 분해능을 가지고 있다 [9]. 이는 적은 개수의 전극 만으로도 인간의 복부나 등과 같은 수준의 공간분해능을 얻는 것을 가능케 했다. 게다가 센서에 가해진 자극을 인지하여 측정 패턴을 실시간으로 최적화하고, 실제 자극이 일어난 자극에 대한 데이터만 전송함으로써 효율적인 측정 및 통신이 가능함도 선보였다 [10]. 하지만, EIT 기반 로봇 피부 또한 수직 힘만 측정이 가능하다는 한계점을 가지고 있었다. 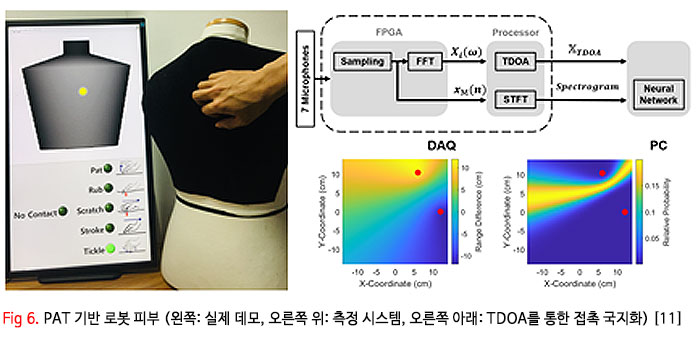 이러한 한계를 극복하기 위해 한국과학기술원 (KAIST) 생체기계연구실은 수동 음향 단층촬영법 (Passive Acoustic Tomography, PAT)을 활용하여 동적 촉각 자극을 측정할 수 있는 로봇 피부 또한 개발했다 (Fig 7) [11]. 이 로봇 피부는 접촉에 의한 소리를 전달하는 레이어와 복수의 마이크로 구성 되어있다. 센서의 외피에 자극이 가해지면 소리가 발생하는데, 이 소리는 멀리 퍼져 나감에 따라 신호의 강도 (Received Signal Strength, RSS)가 감쇠하며 접촉의 위치와 마이크 사이의 거리에 따라 신호가 도달하는 시간도 달라진다 (Time difference of Arrival, TDOA). 개발된 로봇 피부는 복수의 마이크에서 측정된 신호의 크기와 시간차를 측정하고 이를 바탕으로 역문제를 풂으로써 접촉의 위치를 역산한다. 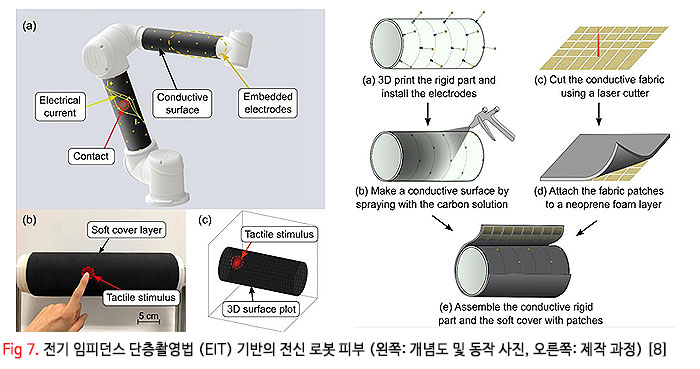 또한 KAIST 연구팀은 PAT 기반의 동적 촉각 센서에 간단한 구조의 심층신경망을 적용함으로써, 측정 신호의 주파수 특성 및 시계열 특성을 추출하여 자극의 종류 (두드리기, 쓰다듬기, 간지럽히기 등)을 구분하는 것이 가능함을 보였다 (Fig 8). 이러한 결과는 전신 로봇피부가 단순히 물리적 자극을 측정하는데 그치는 대신, 발생한 촉각 자극의 의도를 파악함으로써 물리적 상호작용을 통한 의사소통에도 활용될 가능성을 보여준다. 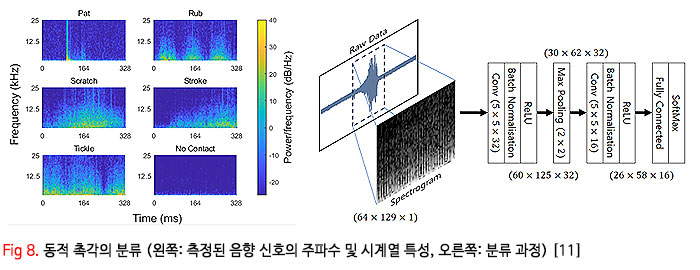 위와 같은 결과들은 단층촬영법 기반의 측정 원리가 가진 고유한 장점을 제시한다. 하지만 단층촬영법 기반 센서의 성능 (공간 분해능, 측정 모달리티 등)은 일반적으로 모듈 방식보다 떨어지며, 안전성을 확보하기 위해서는 추가적인 유연 외피가 요구된다. 따라서 단층촬영법 기반의 로봇 피부를 실제 로봇에 장착하여 실제 pHRI 환경에 적용하는 후속 연구를 시행함으로써 장단점을 명확히 파악하는 것이 필요하다.  이 외에도, 비전 센서(카메라)를 활용하여 대면적 촉각 센서를 구현한 사례도 일본 JAIST (Japan Advanced Institute of Science and Technology) 연구팀에 의해 보고된 바 있다. Duong et al.은 스테레오 카메라를 활용한 대면적 촉각 측정 시스템을 개발했다 (TacLINK) [12]. 이 센서는 유연소재 기반의 외피가 투명한 재질의 내부 골격을 감싼 형태로 되어있으며, 링크의 양단에는 카메라가 배치 되어있다 (Fig 9). 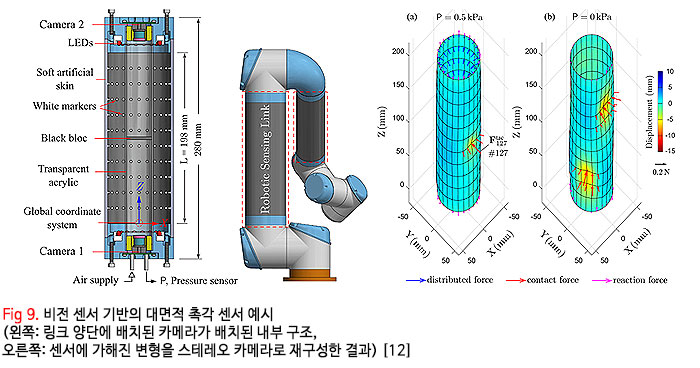 유연 외피 내부에는 흰색 마커가 일정한 간격으로 그려져 있으며, 양단의 스테레오 카메라는 마커의 움직임을 관찰함으로써 유연 외피에 발생한 변형을 3D 이미지로 재구성한다. 이 연구는 스테레오 카메라를 활용하여 대면적 로봇 피부를 구현할 수 있음을 보여주었다. 하지만 투명한 소재를 사용하는 것이 강제됨에 따라 내구성이 떨어진다고 보고되었으며, 센서 내부에서 일어나는 빛 반사나 변형에 의해 마커가 가려지는 현상 (occlusion)과 같은 현상이 센서의 동작을 방해할 수 있다고 보고되었다.  전신 로봇피부는 비구조화된 환경에서 활동하는 로봇에게 외부와의 물리적 상호작용을 인지하는 능력을 부여함과 동시에, 의도치 않은 접촉으로 인한 인간의 부상을 미연에 방지할 수 있어야 한다. 또한 로봇의 표면과 같은 대면적 곡면에 효과적으로 배치할 수 있어야 하며, 다양한 물리적 자극에도 망가지지 않는 높은 내구성이 필요하다. 추가적으로, 전신 로봇피부가 실제 현장에서 널리 활용되려면 간단한 제작 과정과 높은 가격 경쟁력을 확보하는 것도 중요하다. 본 글에서 제시한 사례들은 위와 같은 요구조건을 만족하기 위해 연구되었으며, 결과물들은 실제 센서가 활용되는 방식이나 로봇 시스템과의 통합을 고려한 형태를 띄었다. 하지만 각 연구별로 중요하게 고려한 요소가 달라 모듈형이나 단층촬영법과 같은 다양한 디자인이 제시 되었으며, 각 방법은 서로 다른 장점과 한계점을 가지고 있어 어느 하나가 최고라고 말하는 것이 불가능했다. 만약 각 연구들을 면밀히 분석하여 보완 및 통합한다면, 언젠가 공상과학영화에나 나올 법한 협업용 로봇도 개발할 수 있을 것이라 기대된다.  |
- 로봇피부
- 로봇모듈형
- 유연 외피 내부
- 비전 센서(카메라)
- 단층촬영법 기반




전체댓글 0
(0).jpg)





.jpg)













