


김채형(한국항공우주연구원 한국형발사체개발사업본부)
2022-10-13
|
올해 우리나라 최초의 달 탐사선 다누리를 성공적으로 발사하였다[1]. 달탐사선을 시작으로 태양계 행성 및 소행성 등을 조사 연구하는 탐사선은 1959년 구 소련의 루나 1호[2]를 시작으로 지금까지 지속적으로 진행중이다. 1970년대에 발사되었던 보이저 호는 태양계를 넘어 다른 우주로 벗어 났으며 이런 우주 탐사선은 현재 인간을 대신해 우주에 대한 많은 비밀을 밝혀 주는 수단이 되고 있다. 특히 달과 화성의 경우 탐사선이 궤도에서 지표의 형상을 촬영하는 것에서 벗어나 로버와 같은 탐사 장치를 보내어 지형을 연구하고 지질을 분석하는 등의 연구활동이 수행되고 있다. 기존에 미국, 러시아, 유럽 위주로 진행되던 화성 탐사의 경우에도 인도, 중국, UAE 등 아시아, 유럽 국가들도 참여하게 되면서 그 무대는 점점 넓어지고 있다. 우리나라는 우주 개발 후발 주자이지만 자국 발사체(한국형 발사체)를 사용한 달 탐사선 추가 발사 계획도 있으며 향후 화성 탐사선도 진행될 예정이다. 우주 선진국들은 일반적으로 화성 탐사에 앞서 달 탐사 연구를 선행하게 된다. 행성 궤도에 진입하여 행성 대기와 지형을 촬영하는 것은 우주 동력학과 지구 궤도 위성을 통해 구현이 가능하다. 이후 행성이나 소행성에 착륙선이나 로버를 보내어 연구를 진행하는 것은 지구에서 가장 가까운 달이 선행 연구로 적합하다. 그래서 화성에 로버를 보내려고 하는 국가들은 먼저 달에 로버를 보내어 일정 연구를 하면서 자료를 수집하게 된다. 미국, 러시아, 중국, 인도 등의 국가가 달에 탐사 로봇 또는 로버를 보내는 것은 달에서 인간이 거주 가능할 수 있도록 물을 찾는 것도 있지만 달에 있을 광물 채굴과 화성 탐사 전에 외계 행성의 지형에서의 선행 연구 자료가 필요하기 때문이다. 동향 보고서에서는 달과 화성 탐사와 관련된 최근 개발 동향 위주로 기술하고자 한다.  루나 1(Luna 1)호는 구 소련이 세계 최초의 궤도 인공위성인 스프트니크를 발사하면서 1959년 세계 최초로 지구 중력장을 벗어나 달궤도에 접근한 탐사선이다[2]. 루나 1호는 3번의 발사 실패 후에 달 궤도에 진입하였으나 달궤도에 머물지 못하고 태양주회궤도(heliocentric orbit)에 진입하게 되어 뜻하지 않게 최초로 지구 중력을 벗어나 태양 주위를 도는 인공 위성이 되었다. 루나 1호는 최초의 탐사선이자 탐사 로버 이기도 한데 원래 목적은 달과의 충돌을 통해 발생하는 미세 먼지를 분석하여 달 표면 성분을 분석하기 위해서였다. 이후에 같은 위성인 루나 2호는 달에 충격 착륙을 성공적으로 수행하였다. 로나 2호는 지구 자기장 외부의 태양풍량을 최초로 측정하였지만 달과 관련된 대기 측정은 기기 고장으로 측정하지 못하였지만 달 상부 8000 km에서 이온 입자 측정을 통해 달의 전리층 존재를 최초로 증명하였다.  현재 세계 각국에서 탐사 경쟁을 하고 있는 화성 탐사는 1964년 매리너(Mariner) 4호에 의해 최초로 이루어졌다[3]. 매리너 탐사선은 각 행성을 탐사할 목적으로 만들어진 탐사선으로 매니너 2호는 금성에 최초로 접근한 탐사선이다. 매리너 4호는 기존에 데이터를 측정하여 받는 것과 달리 최초로 디지털 이미지를 심우주로부터 전달 받은 최초의 탐사선이다. 화성 표면을 촬영한 이미지를 받았으며 이를 통해 화성도 달과 비슷한 환경 임을 알게 되었으며, 지금의 화성 거주 프로젝트가 가능하게 된 계기가 되었다. 매리너 4호가 3년이라는 기간 동안 보내온 데이터 양은 약 634 kB이며 요즘 파일 용량을 생각하면 매우 적은 양이지만 1960년대 컴퓨터가 나온 초창기임을 생각하면 대단한 데이터였을 것이다.  이후 가장 최근에 화성 탐사를 수행한 탐사선은 퍼서비어런스(Perserverance)이다. Perserverance는 탐사선보다는 탐사 로봇(로버)이다. Perserverance는 2020년 7월에 발사되어 2021년 2월에 화성에 성공적으로 착륙하였다[4]. 2022년 8월 현재 1년 6개월 이상 임무를 수행 중이며 예정된 임무 기간은 약 2년이다. 무게는 약 1톤이며, UHF(400 MHz, 2 Mbit/s), X band(7~8 GHz, 800 bit/s)의 통신 시스템을 사용하며 MMRTG(Multi Mission Radioisotope Thermoelectric Generator) 배터리를 사용하고 있다. MMRTG는 NASA(Aerojet Rocketdyne과 Teledyne Energy Systems 공동 개발)에서 개발한 플로토늄 238을 사용하는 핵배터리로써 열전대(thermocouple)에 열이 전달될 때 열 에너지를 전압차로 전이해주는 Seebeck효과를 사용한 것으로 이전 나사의 심우주 탐사선에 사용된 RTG를 개량한 것이다. MMRTG는 기존 태양광 전지의 단점인 태양이 없는 곳에서 에너지를 얻지 못하는 것을 대처한 것으로 현재 심우주 탐사에 사용되는 나사의 기기에는 대부분 MMRTG를 사용한다. Perserverance의 화성 탐사 목적은 화성 표면의 지질 분석과 그 샘플을 지구로 가져오는 것까지 포함하고 있으며, 과거 화성에서 강이 있었던 것으로 추정 되는 예지로(Jezero crator)분화구에 착륙하였다. Perserverance의 최대 속도는 25 km/h이며 장착된 장치 중에 MOXIE(Mars Oxygen ISRU Experiment)는 화성 대기 중의 이산화탄소에서 산소를 추출하는 장치를 가지고 있다. 2021년 4월 기준으로 약 5.37 g의 산소를 1시간 동안 추출하였다. 이는 아직 테스트 모델이지만 차후 인간이 화성에서 탐사를 시작할 경우 대형 MOXIE를 사용하여 생활에 필요한 산소를 얻을 수 있을 것으로 판단하고 있다. 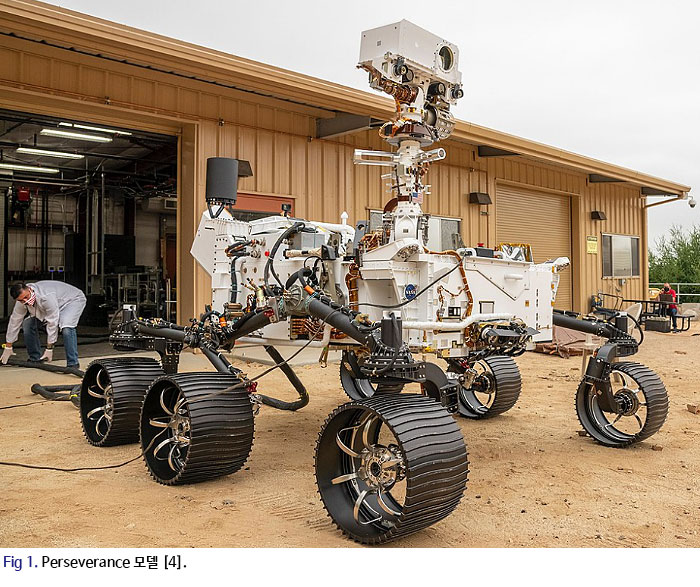 Perserverance는 탐사 로버이지만 Ingenuity(독창성)라는 헬리콥터형 드론이 탑재되어 있다[5]. Ingenuity는 지구 외의 다른 행성에 비행한 최초의 비행체이다. Ingenuity는 Perserverance 가 작동되고 2달 뒤인 2021년 4월 정상 비행을 수행하였다. 수직 이착륙, 호버링(정지 비행) 등 39초 동안 비행을 하였고 2022년 6월 기준으로 29회의 비행을 하였다. Ingenuity는 1.8 kg, 121 cm X 49 cm 길이로 로터의 길이가 약 122 cm 이다. 착륙은 38 cm의 4개의 다리를 사용하고 태양 충전 리튬이온 배터리를 사용하고 있다. 2022년 6월 기준으로 7.17 km, 총비행 시간은 총 55분 23초이다. 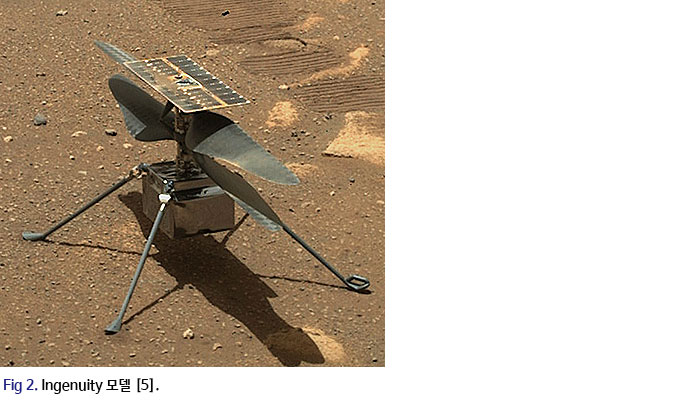 Ingenuity는 Perserverance 가 할 수 없는 화성의 공중 촬영과 사전 답사를 하는 것과 함께 화성과 같은 외계 해성의 대기 조건에서 드론이 비행하는 지 검증하는 것도 있다. 현재 운용 중인 Ingenuity 후속 모델은 화성의 얼음과 박테리아 같은 것을 탐사하는 목적으로 6개의 로터에 약 30kg 정도의 드론을 개발하고 있다. 현재 개발명은 Mars Science Helicopter이며 5 kg 탑재 중량에 한번의 비행에 약 10 km까지 가능하다.  지금까지 화성에 탐사선을 보내어 착륙을 했던 나라는 미국, 러시아이며 2020년 7월 중국에서도 세계에서 세번째로 화성에 탐사선을 성공적으로 착륙시켰다[6]. 화성에 로버를 착륙시켜 정상 작동한 기록을 생각하면 구소련은 착륙은 했으나 기체 파손으로 통신이 두절되었기에 중국이 미국에 이어 두번째로 성공한 나라이다. 2020년 7월 자국 발사체인 Long March 5에 실어 발사하였으며 2021년 2월에 화성 궤도에 도착하였다. 3개월동안 화성 궤도를 돌며 착륙 지점에 대한 자료를 수집하고 2021년 5월에 화성의 유토피아(Utopia Planitia) 평원에 착륙하였다. 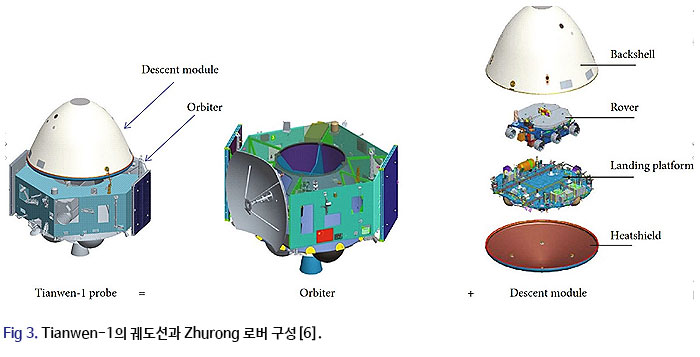 Tianwen-1(텐원)은 화성 궤도선으로 Zhurong 로버의 착륙 캡슐을 포함하고 있다. 텐원은 한자로는 ‘하늘에 묻는다’는 의미를 가지고 있다. Tianwen-1의 목표 임무 기간은 약 2년, 로버인 Zhurong은 약 93일정도로 임무 수명을 예상하고 있다. Tianwen-1의 무게는 약 3175 kg, Zhurong의 무게는 약 240 kg이다. Tianwen-1 궤도선은 화성 궤도를 돌면서 2대의 카메라가 장착된 소형 위성(TDC(Tianwen-1 First Deployable Camera)-1)을 사출한다. 이 TDC-1 위성의 목적은 Tianwen-1 궤도선의 사진과 착륙선의 열차폐를 촬영하고 Tianwen-1과의 통신 테스트를 하는 게 목적이다. Zhurong 로버는 태양 판넬을 사용하여 전기 에너지를 얻는다. 지상 관통 레이더(GPR)을 사용하여 지하 100 m의 지질을 조사하며, 화성표면 자기장 감지기(MSMFD), 화성 기상 측정 기기(MMMI)을 통해 화성의 지형 등을 측정한다. 또한 화학적 분석을 통해 혹시 있을 수 있는 생명체의 흔적을 조사한다.  미국, 러시아, 유럽에 이어 세계에서 4번재로 인도는 2013년 11월에 MOM(Mars Orbiter Mission) 또는 Mangalyaan을 PSLV에 탑재하여 발사하였고, 2014년 9월부터 화성 궤도에서 탐사를 시작하였다[7]. Mangalyann의 가장 큰 특징이라면 화성 탐사에 역대 최저 비용이 사용되었다는 점이다. 평균적으로 미국이 화성 탐사에 사용하는 예산의 10분 1밖에 들지 않았으며 이는 단순히 화성 탐사를 위한 기술 검증용 모델로 구조를 단순화 시켰고 제작 비용 또한 적게 사용되었기 때문이다. 태양 주회 궤도를 통해 지구에서 화성으로 궤도 이동 비행, 탐사 위성의 전력, 통신, 기타 탐사 장비 작동 성능 등을 검증하였으며, 화성 촬영, 화성 대기의 메탄이나 이산화탄소 측정, 화성 상층 대기권에서의 태양풍 및 우주선에 따른 동적 특성 등을 측정하였다. 2015년 3월에 공식적으로 Mangalyann의 화성 궤도에서의 6개월 간의 임무는 종료되었다. 이후 Mangalyaan는 기타 임무를 수행 중이며 2020년 7월에 화성의 위성인 Phobos를 4200 km 떨어진 곳에서 촬영하였으며, 2021년 7월 화성 고도 75000 km 상공에서 해상도 3.7 km로 풀 이미지를 촬영하였다. 인도 우주국은 2024년에 Mangalyaan-2호를 발사할 예정이다. 2020년에는 미국의 Perseverance, 중국의 Tianwen-1과 함께 UAE에서 Hope라는 위성을 2020년 7월에 발사하여 2021년 2월에 화성 궤도에 안착시켰다[8]. UAE는 자국의 기술엔지니어와 외국 연구기관들과의 협업을 하는 방식으로 개발을 했으며 Hope위성 본체는 미국 Colorado Boulder 대학의 대기 및 우주 물리 연구소에서 Arizona State 대학과 UC Berkeley 대학의 협조로 제작되었다. 임무 수행 기간은 2년 이며 무게는 550 kg, 2.37 m X 2.9 m 크기를 가진다. Hope 위성은 화성의 먼지 폭풍 같은 저고도 기상이나 계절성 기후 등을 측정하는 목적을 가진다. UAE의 Hope위성은 2020년 7월 일본 H-IIA로켓에 탑재되어 발사되어 2021년 2월에 화성 궤도에 성공적으로 안착하였다. UAE 화성 탐사선은 아랍세계에서는 최초이며 세계에서 5번째로 화성에 탐사선을 보낸 국가가 되었으며 화성 궤도에 실패없이 한번에 성공한 2번째 국가가 되었다.  Chang’e 5(창어5)는 중국의 CLEP(Chinese Lunar Exploration Program)의 5번째 달 탐사 미션이면서 중국 최초로 달에서 표면 샘플을 가지고 지구로 귀환한 탐사로봇이다[9]. Chang’e 5호는 2020년 11월 23일에 Long March 5에 실려 발사되어 2020년 12월 1일에 달에 착륙하여 약 1 m 깊이에서 1.73 kg의 달 지표 샘플을 가지고 2020년 12월 16일에 지구로 무사 귀환하였다. 이는 1976년 구소련의 Luna 24 이후 최초의 달 샘플 귀환 비행으로 미국, 러시아에 이어 세계에서 3번째로 달에서 샘플을 가지고 온 국가가 되었다. 중국의 CLEP 프로그램은 총 4단계로 구성되어 있다. 1단계는 2007년 Chang’e1, 2010년 Chang’e 2의 달 궤도 비행이다. 2단계는 달에 부드럽게 착륙하고 로버를 사출하는 것으로 2013년 Chang’e 3가 수행했으며, Chang’e 4호는 2018년 12월에 발사되어 2019년 1월에 달의 반대쪽 가장 먼 지점에 착륙하였다. 3단계는 달에서 샘플을 가지고 귀환하는 것으로 이번에 Chang’e 5호와 실패했을 경우를 대비한 Chang’e 6호가 있다. 4단계는 달 자원을 사용한 재료 조달(In-situ resource utilization)과 달 남극에 국제 달 탐사 기지를 건축하는 것이다. 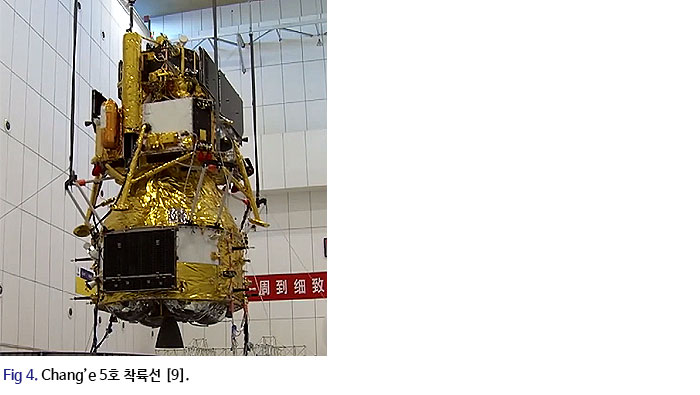 Chang’e 5호는 착륙선, 이륙선, 궤도선, 복귀선으로 구성되어 있다. 착륙선은 궤도선에서 분리되어 달에 착륙하며 드릴과 파는 장치가 장착되어 있으며 착륙선 상부에 이륙선이 장착되어 있다. 이륙선은 로버가 달 지표 샘플을 가져오면 이륙선 저장소에 저장이 되어 이륙을 하며 궤도선에 자동으로 도킹을 하게 된다. 샘플이 자동으로 궤도선으로 이송이 되면 이륙선은 분리가 되어 다시 달로 착륙을 하는데 이는 우주 쓰레기 발생을 방지하기 위해서이다. 궤도선은 달궤도를 벗어나 약 4.5일간 비행하여 지구 궤도로 진입하게 되며 캡슐을 분리하게 된다. 궤도선에서 분리된 캡슐은 복귀선이며 일반적인 지구 재진입 과정으로 대기면을 물 수재비처럼 튕기면서 지구로 재진입하게 된다. 궤도선은 달 샘플 임무를 완수하고 추가적인 임무를 수행중이다. 2022년 1월 달의 DRO(lunar distant retrograde orbit)를 돌면서 원격 측정을 통한 초장기선 전파간섭계(VLBI, Very Long Baseline interferometry) 테스트 등을 수행하고 있다.  아시아 국가중에서 중국, 인도에 이어 달탐사를 준비 중인 국가는 일본이다. 일본 JAXA는 달착륙 탐사선인 SLIM(smart Lander for Investigating Moon)을 개발 중이다[10]. SLIM의 개발 목적은 달의 정확한 지점에 착륙하는 것이다. SLIM이 달의 특정 분화구 지점에 착륙하고자 할 때 SLIM은 안면 인식 시스템을 사용하여 해당 정보를 달 궤도 위성인 Kaguya에 보내고 이를 계산하여 SLIM이 정확한 지점에 착륙할 수 있도록 유도하는 방식이다. 낙하산이나 역추진 등을 사용한 부드러운 착륙 방식을 사용하며 위치 오차는 약 100 m 정사각형 정도이며 이전 Apollo 11의 경우 위치 오차 20 km X 5 km 임을 감안하면 매우 정확한 착륙 방식이다. 2017년부터 개발되어 2021년에 발사 예정이었으나 XRISM(X-Ray Imaging and Spectroscopy Mission) 서브 미션 때문에 2023년으로 연기되었다. XRISM은 Kaguya가 발견한 용암 구멍 지형인 Marius Hill Hole을 조사하기 위한 임무로 이를 위한 추가 예산이 180억엔이다 보니 개발이 늦어지고 있다. JAXA는 아르테미스 프로그램에 참여하고 있으며 OMOTENASHI(Outstanding Moon exploration Technologies demonstrated by Nano Semi-Hard Impactor) 6U CubeSat을 SLS(Space Launch System)에 실어 보낼 예정이다[10]. OMOTENASHI에서 1 kg 소형 달 착륙선을 사출하여 달 지표 부근에서 역분사를 통해 달 표면에 약한 충격 착륙(semi impact landing)을 하는 방식이다.  국내에서는 2022년 8월 KLPO(Korean Pathfinder Lunar Orbiter) 다누리가 SpaceX의 Falcon-9에 탑재되어 발사되었다[1]. 태양 전지판을 펼쳤을 때 길이는 6.3 m 총 중량은 678 kg, 임무 기간은 약 1년이다. 태양, 지구, 달의 중력을 이용하는 방식인 탄도형 달 전이 궤적을 따라 달 궤도에 향한다. 직진 방식이 아니다 보니 달까지 가는데 약 4.5개월이 소요된다. 달의 남북 상공 100 km 고도를 원운동을 하면서 돌게 된다. 다누리에는 고해상도카메라(한국항공우주연구원), 자기장측정기(경희대학교), 감마선 분광기(한국지질자원연구원), 광시야편광카메라(한국천문연구원), 우주인터넷 탑재체(한국전자통신연구원), 영구음영지역카메라(NASA)가 탑재되어 있다. 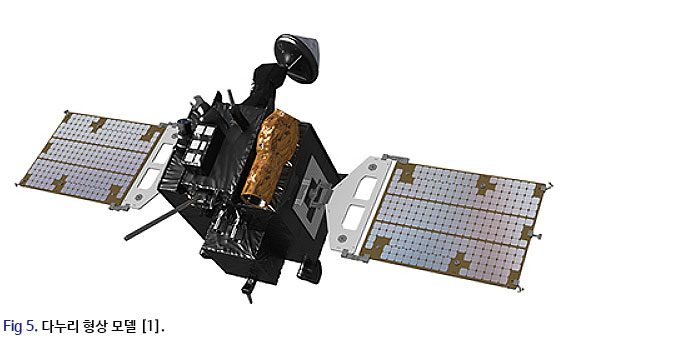 국내외 대학 및 연구원에서 제작된 측정 장치가 탑재되어 있으며 NASA의 영구음영지역카메라는 아르테미스 본 탐사의 선형으로 달의 지형을 탐사한다. 다누리와 통신을 주고 받을 수 있는 심우주지상시스템이 구축되어 있다. 지구 저궤도는 고도 600 km이며 이를 기준으로 달까지 약 640배, 다누리가 지구에서 가장 멀어졌을 때는 약 2600 배인 1,560,000 km 떨어져 있게 된다. 따라서 이런 원거리에 대한 통신 장치가 필요하며 이는 심우주 지상안테나이다. 심우주 지상안테나는 경기도 여주에 위치해 있으며 안테나 직경은 국내 최대인 35 m이며 높이 42.7 m, 무게는 약 710톤이다. 이를 통해 다누리의 실시간 위치를 추적 가능하며 https://www.kari.re.kr/kplo/#에서 확인이 가능하다.  현대자동차는 UAM(Urban Air Mobility)과 함께 로봇 쪽에도 개발 및 투자를 진행하고 있다. 현대자동차그룹 산하 미래 모빌리티 조직인 ‘뉴 호라이즌스 스튜디오’는 변신 지능형 지상 이동 로봇인 TIGER(Transforming Intelligent Ground Excursion Robot)의 개념 모델 X-1의 이미지를 선보였다[11].  TIGER는 길이 80 cm, 폭 40 cm, 무게 12 kg에 4개의 다리와 바퀴가 달린 소형 무인 로봇이다. 현대자동차는 국내 6개 정부 출연 기관(한국천문연구원, 한국전자통신연구원, 한국건설기술연구원, 한국항공우주연구원, 한국원자력연구원, 한국자동차연구원)과 공동연구 협의체를 구성하여 달 표면 탐사 모빌리티 개발 의지를 보이고 있다.  미국, 러시아, 유럽연합 만이 무인 우주 탐사선을 보내던 과거와는 달리 지금은 중국, 인도, 일본, UAE 등 여러 국가들에서도 달이나 소행성, 화성 등에 탐사선을 보내는 시대가 되었다. 우리나라도 2022년 올해 국내 기술로 제작된 누리호 같은 우주 발사체를 발사할 수 있는 능력을 가졌으며, 인공위성 기술은 이미 세계 탑이며 다누리호 역시 우리 기술로 발사하여 달을 향해 정상궤도 비행중이다. 중국은 달착륙선과 화성 착륙을 성공했으며, 일본은 소행성에 착륙하여 샘플을 가지고 지구로 복귀하는 등 주변 국가에 비해서 우주 탐사선 시장 진입이 늦었지만 2022년을 시작으로 국내 우주 탐사선 기술 개발은 빠른 속도로 발달할 수 있을 것으로 판단된다. 그 이유는 기존에 정부와 연구원 주도의 우주기술 개발에서 국내 대기업들이 적극적으로 우주항공 시장에 참여를 하고 있으며, 우주개발을 위한 인프라가 국내에서도 점차 증가하고 있기 때문이다. 우주 개발은 우주항공 기술뿐만 아니라 통신, 전자, 인공지능, 로봇, 지질 등 다양한 분야와 융합을 이루고 있다. 특히 4차산업의 선두주자인 인공지능, 메타, 로봇, 드론 등의 기술 발달은 우주 탐사 기술 속도를 가속화 시키고 있다. 우리나라도 정부의 3차 우주개발진흥기본계획에 따르면 달 궤도선인 다누리를 통해 심우주 항해에 대한 자료를 수집하고 선행 기술 개발을 통해 2030년에 한국형 발사체를 통해 달 착륙선을 보내며, 2035년에는 소행성 샘플귀환선을 보낸다는 계획을 수립하고 개발이 진행중이다[1]. 이에 우리나라도 가까운 시일 내에 우리 기술로 우주 선진국 대열에 진입할 수 있을 것이다.  |
- KLPO(Korean Pathfinder Lunar Orbiter) 다누리
- SpaceX의 Falcon-9
- TIGER(Transforming Intelligent Ground Excursion Robot)
- UAM(Urban Air Mobility)
- 달과 화성 탐사




전체댓글 0
(0).jpg)





.jpg)













